基于TMS320LF2407的CAN总线数控系统底层测控模块
用计算机或微控制器通过一种或多种总线方式,实现与现场各种设备的通信,并通过总线实现对现场设备进行必要控制的计算机网络系统称为底层测控通信网络系统,简称底层测控网络。本文是针对数控系统方面来展开研究的,提出了一种基于CAN总线的数控系统底层测控网络,现场设备就是数控机床等数控设备。
2CAN总线的基本工作原理
CAN总线的拓扑结构是一个典型的串行总线的结构形式。CAN总线中一个节点发送信息,多个节点接收信息;但CAN总线的信息存取方式采用的是一种广播式的存取工作方式。在CAN总线的通信协议中支持的是基于报文的工作方式。也就是说加入或撤销节点设备都不会影响网络的工作,十分适用于控制系统要求快速、可靠、简明的特点。CAN总线的数据通信具有突出的可靠性、实时性和灵活性。CAN采用了CRC校验并可提供相应的错误处理功能,保证了数据通信的可靠性。为了清楚地说明数控系统远程测控仪的工作原理,我们以结构方框图的形式表示如图1所示。输入信号来自于数控机床电机编码器的光电编码器,输出信号可以去伺服驱动或控制其它需要的信号,下面是它的工作原理:
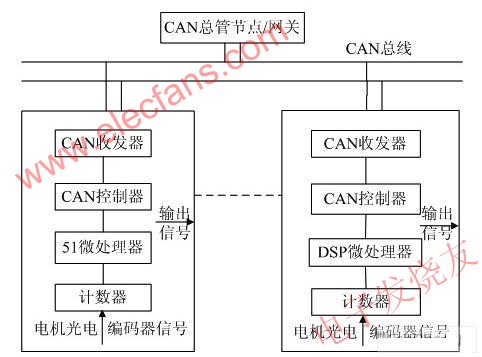
图1基于CAN总线的数控系统远程测控仪的工作原理图
由伺服电机编码器的脉冲输出信号进入测控仪的输入端,后经计数器滤波、倍频、鉴相、计数等;微处理器对采来的数据进行一定较简单处理,再转发到CAN控制器的缓存器里面;时机成熟CAN控制器再进一步发给CAN收发器(驱动),最后CAN收发器把数据转发给CAN总线、总管CAN节点的收发器、CAN控制器;总管CAN节点充当网关的作用,把底层CAN节点的数据取出来以便自己或其它对其进行进一步的复杂分析处理,相反上面来的数据依照同样的道理可以通过CAN网关下传到底层的CAN节点。就这样底层和中间层进行了数据信息的交流。底层的CAN节点也可以接受CAN总管节点发来的信息,通过输出信号通道把命令传给相应的接口电路、伺服系统,以便对数控设备进行控制。
3基于DSP的CAN测控仪的设计与开发
本文选用的微处理器是由TI公司生产的TMS320LF2407。基于DSP的CAN测控仪的系统原理框图如图2所示:
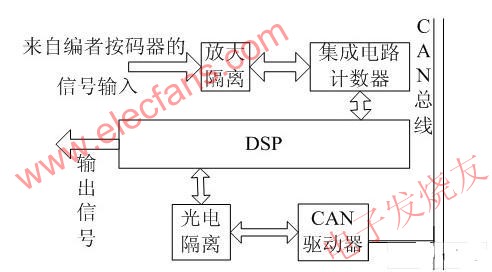
图2基于DSP的CAN测控仪的系统原理框图
DSP用的CPU用TI公司的2000系列的TMs320LF2407实现,光电隔离用6N137实现,CAN驱动器用PCA820C250实现。因为TMS320LF2407自带有CAN控制器,所以这里就不用加控制器。
3.1测控模块硬件设计
智能结点包括信号采集、信号处理及信号传输三大部分,根据所选用的微处理芯片所带的外围接口的不同,整个智能结点的结构有所不同。本系统所选用的TMS320LF2407带有丰富的外围接口,所以整个智能结点结构简洁,系统的可靠性极强。以TMS320LF2407为核心的智能结点电路包括以下部分:电源电路、时钟复位电路、CAN总线接口电路、信号调理部分及外扩存储电路,其结构框图如图3:
图3智能结点总体结构图
由于TMS320LF2407内嵌CAN模块,所以通过一个CAN驱动器就可以与CAN总线相连。为了增强CAN总线结点的抗干扰能力,CANTX与CANRX并不直接与CAN驱动器82C250的TXD和RXD相连,而是通过高速光耦6N137进行电气隔离后,再与82C250相接。这样就很好的实现了总线上各CAN节点间的电气隔离,避免了相互之间的电气干扰。本系统中6N137所采用的电源3.3v、5V及5V-CAN是相互隔离的,保证了光耦器件的电气隔离功能。82C250与CAN总线的接口部分也采用了一定的安全和抗干扰措施。82C250的CANH和CANL引脚各自通过一个5欧的电阻与CAN总线相接,电阻起到限制电流的作用,保护82C250免受过流的冲击。CANH与CANL与地之间并联了两个30pF的小电容,可以起滤除总线上的高频干扰,并具有一定的防电磁辐射的能力。另外在两根CAN总线输入端与地之间分别接了一个防雷击管,当输入端与地之间出现瞬变干扰时,通过防雷击管的放电可以起到一定的保护作用。
3.2时钟和复位电路设计
3.2.1时钟电路设计
本文采用6M的晶体振荡器,晶振的输出直接连接到X2引脚,并将DSP的X1引脚悬空。在设计程序时,设置DSP内部的时钟锁相环为4倍频,则CPU的工作时钟就可达到24M。
3.2.2复位电路设计
在设计中,使用了上电复位和按键复位相结合的简单电路.在上电的瞬时,电容相当于短路,在上电的瞬时,电容C16相当于短路,此时RST为低电平,对芯片进行复位处理。经这一段时间后,电容的电压达到2V,则复位过程结束,芯片进入正常工作区。当按下K1时,RST直接与地相连接,芯片进行复位处理。因此操作者可以根据自己的需要随时对系统进行复位操作。
3.3电源电路设计
TM3S20LF2407A的工作电压是.33v,而设计中用到的晶体振荡器、光耦隔离器件6N137、CAN驱动器均为SV供电,因此以TMS32
TMS320LF2407CAN总线数控系统底层测控模 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)