TMC428芯片在步进电机系统中的应用
计算。采用3个TMC236构成一个菊花链,每个 TMC236控制一个步进电机,当初始化完成后,TMC428可以脱离单片机自动地把控制数据发送给TMC236实现对电机的控制,但由于TMC236所发出的控制信号比较弱,不足以驱动电机,所以在TMC236发出的控制信号必须进过功率放大才能驱动电机。系统结构如图二所示。
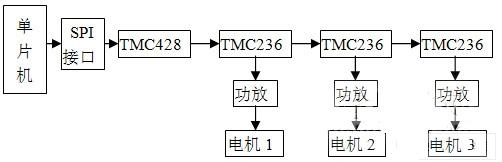
图二
三、硬件设计
本系统单片机选用AT89S52,系统时钟频率采用16MHZ,由于TMC428的最高工作频率能够达到16MHZ,但TMC236的PWM操作频率不能超过100KHZ,所以为了方便设计本系统采用分频电路对16MHZ的时钟频率分频为20KHZ,TMC428和TMC236都采用同一20KHZ时钟频率。为减小电源的复杂性,系统由单一+5V直流电源供电。由于本系统中TMC428不使用内部中断,所以3个参考开关输入必须接地,同时没有使用 3.3V电源,所以V33引脚必须通过一个470nF的电容接地,+5V输入电源要通过一个100nF的电容滤波,以保证TMC428的可靠运行。驱动 SPI接口的数据输入线SDI_S引脚要通过一个阻值为10K的电阻下拉。TMC428的nscs_s引脚作为3个TMC236使能信号与CSN引脚相连。控制数据通过SDO_S引脚传送至TMC236的SDI引脚中,由于采用的是菊花链形式,所以3个TMC236通过各自的SDO——SDI两个引脚相串联。在TMC236电路设计中,20KHZ的外部时钟从OSC引脚输入。由于TMC236内部集成了HVCMOSFET构成的双全桥驱动电路,它采用恒流斩波驱动方式来驱动双极性二相步进电机,其中电机的供应电源由VS引脚输入,但必须在VS引脚上连接220pF和100uF的电容进行滤波,在本系统中采用+12V的直流电源作为电机两相绕组的励磁电源。TMC236的OA1和OA2连接步进电机的A相励磁绕组,而OB1和OB2连接步进电机的B相励磁绕组。另外,为了限制电机的最大电流,必须对TMC236双全桥驱动电路设置限流电阻Rs,Rs电阻的设置可根据如下计算公式计算:
其中Imax为电机所允许的最大电流,在这里Imax=1030mA,所以计算电阻Rs=0.33Ω。本系统采用脉冲变压器作为功率放大装置直接对步进电机供电。系统的主电路如图三所示。
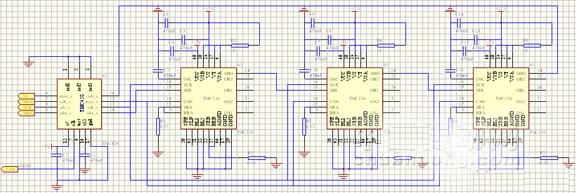
图三
四、软件设计
控制系统的软件主要完成对TMC428的初始化以及控制参数计算和发送的工作。在初始化过程中首先要对TMC428的工作模式进行设置,一个是位置控制模式和速度控制模式,另外就是TMC428所要控制的步进电机的个数。这些参数的设置是通过微处理器向TMC428的相关寄存器写数据来完成。其中位置和速度控制模式寄存器的地址为1010,在本系统中位置控制采用RAMP模式,速度控制采用VELOCITY模式。由于本系统是三轴控制设计,所以TMC428要同时对三个步进电机进行控制,因此在步进电机全局配置参数寄存器设置中要把寄存器的地两位设置为10,其他位采用默认值。根据 TMC428的功能要求,每个电机都有自己的配置寄存器,对于电机的初始位置和初始速度都要在各自寄存器中单独设置。在初始化过程中对电机的目标速度、目标位置、实际速度和位置以及加速度和速度的最大值、最小值进行设置00地址表示电机1,01地址表示电机2,10地址表示电机三,其寄存器地址范围为 0000~1110。当初始化完成后根据实际需要微处理器在任意时刻都可以改变寄存器和片内RAM中的数据以适应实际控制。本系统的软件工作过程如图四所以。
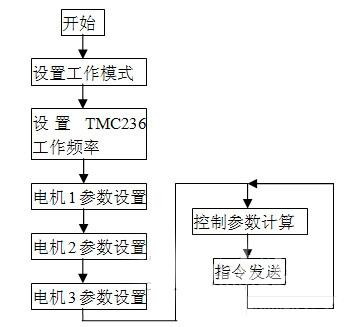
图四
五、总结
采用专用步进电机运动控制器和驱动电路组成的系统具有外围电路简单、系统抗干扰能力强和可靠性高等优点,可减少控制电路的开发成本。整个系统除了电源之外只有5个IC,因此,体积小,控制简单,特别适用于3轴步时电机的驱动。实验证明该驱动器控制的步时电机定位精度高,加、减速性能良好,同时,启停、反转性能也很优良。
TMC428芯片步进电机系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)