如何使用CANScope解析和破解车载协议
CANScope支持各种车载CAN-bus应用协议的解析,只要用户在CANtest软件中导入相关的DBC文件,即可实现应用层数据的解析。可用于车辆CAN协议解析、车辆测试维修、破解车辆CAN协议等。特别是支持国网充电桩与电动汽车BMS(电池管理系统)的通讯协议解析与验证,只要用户将CANScope接入被测系统,即可实现协议数据的解析。如图 1所示。
图 1CANScope总线分析仪解析示意图
操作步骤
1.将仪器测试头接入被测系统CAN总线,打开CANScope软件,选择正确的波特率,启动。如果正确连接与设置,将会有数据出现,如图 2所示;
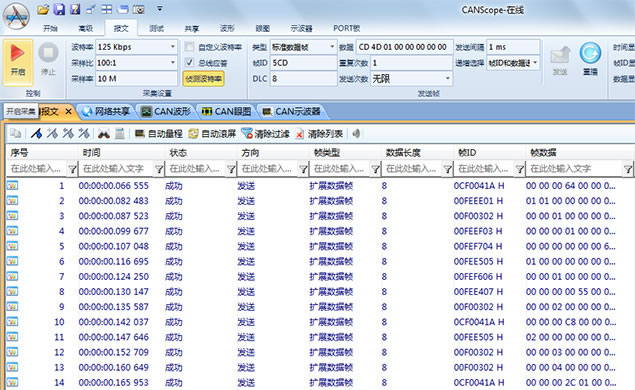
图 2 打开CANScope软件
2.点击菜单“高级”操作中的“报文解析列表”,进入解析界面,如图 3所示;
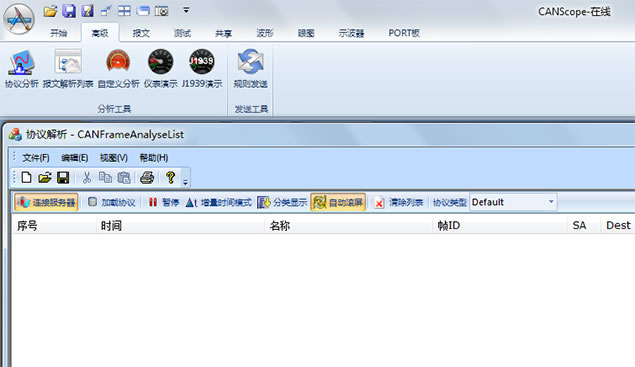
图 3 打开报文解析列表
3.如果客户有对应设备或者系统的DBC文件,则在报文解析列表界面中,点击“加载协议”,选择某个DBC文件打开,然后点击菜单栏上的“分类显示”,如图 4所示;
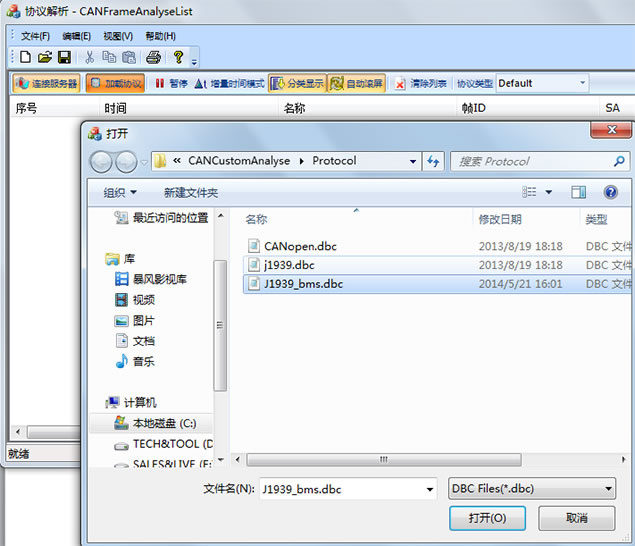
图 4 加载DBC文件
4.此时接收数据即可进行协议解析,用户可以使用分类显示获取实时值或者刷新显示查看具体的帧时序关系。如图 5所示。软件自动会将有变化的数据标红,便于用户对应实际的物理量。比如我们可以动一下方向盘,然后同步观察哪些标红的变量变化规律与之类似,则将此ID和标红的数据段登记起来。实现协议破解;

图 5 协议解析
5.协议破解还有一种重要手段——报文重播: 使用CANScope接入被测总线,将全部CAN报文记录下来,获得完整的控制时序。如图 6所示;

图 6 记录所有报文
然后将报文添加到重播列表,将记录的报文导入重播序列。如图 7所示。
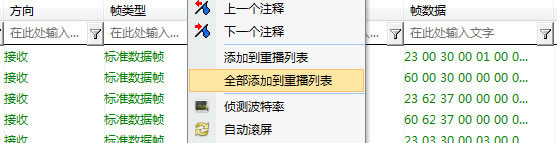
图 7 添加到重播列表
然后重播复现控制时序:点击CANScope软件的重播功能 ,可以看到每个控制报文与应答报文的逻辑顺序与时间间隔都清晰呈现。点击播放后,可仿真原总线时序发送出来。并且可以多次重复仿真,无需原测试对象。如图 8所示。
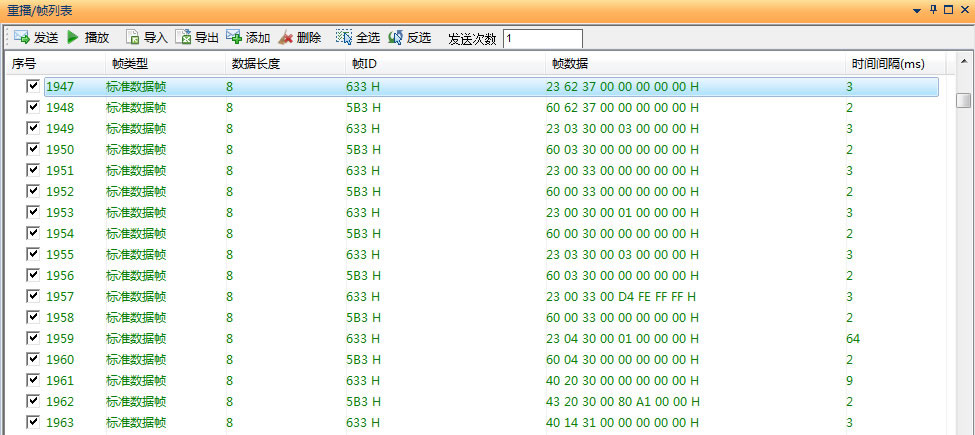
图 8 按原时序重播
CANScope析车载协 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)