智能移动设备的数控系统研究
引言
智能制造、协同制造等先进制造模式对车间数字化制造设备的要求越来越高。车间是一个不确定的系统,而人具有形象思维的能力,把人的智能和生产设备的自动化结合起来将为制造企业的信息集成和协同制造创造很好的条件,而开展基于智能移动设备的数控系统的研究,即掌上数控系统(PalmCNC),将为底层生产设备的控制和上层管理层的信息交流提供很好的平台。
1 数控系统的模型
1.1 掌上数控系统硬件平台的选择
掌上数控系统硬件平台选择Pocket PC。它的优点是可以在任何时间、任何地点通过无线通信技术(802.11或蓝牙)得到想要的信息,同时也能在任何时间任何地点对信息进行编辑和发布。这种获取和编辑发布信息的实时性特点有利于对数控系统的进一步研究与开发;有利于开发方便管理者或操作者在车间对数控设备进行实时管理、实时控制和实时在线帮助的数控系统。
1.2 Palm CNC的无线通信技术
802.11 g标准与以前的802.11协议标准相比有以下特点:在2.4 G频段使用OFDM调制技术,使数据传输速率提高到54 MB/s;802.11 g标准能够与802.11 b的WiFi系统互相连通,存在于同一AP网络里,保障了后向兼容性。802.11 g无线通信标准具有高移动性、可扩充性强、建设成本低、抗干扰能力强、通信速度高等特点,能够保证在车间复杂而又恶劣环境下安全工作。所以对于Palm CNC而言,选用802.119无线通信的标准是完全可行的。
1.3 数控系统的系统模型
Palm CNC能够与车间管理层和车间设备层相互通信,实现信息交换,即向上能动态地向车间管理层反馈车间设备层的实时工作情况,同时也能从车间管理层获取实时的调度信息和其他在线帮助;向下能动态控制车间设备层,动态采集车间设备的实时信息,特别是对普通设备的信息收集。能够发挥Pocket PC的移动能力,从车间管理层下载NC程序,然后传到相应的数控设备上,减少输入的错误。从而实现车间底层信息收集一反馈一控制三位一体化,使车间构成一个真正意义上的闭环系统,如图1所示。
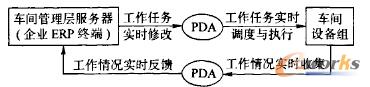
图1车间数字一体化闭环系统原理图
可以看出,车间管理层(车间服务器)、数控系统(PDA)和车间设备层可以通过无线通信进行信息交换,而要提高信息在车间底层的互流动能力,就必须丰富数控系统的功能,可以采用c/s或B/S结构。经过分析和讨论后,提出了如图2所示的Palm CNC模型。它采用事件驱动,因而具有良好的可扩展性。
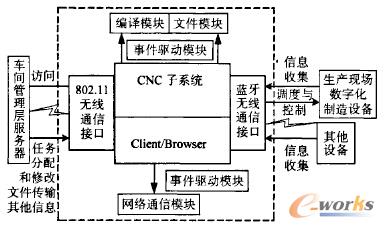
图2 PalmCNC模
1.4 数控系统的网络拓扑结构
图3是Palm CNC网络拓扑结构。是一种可重构的、支持制造系统无缝集成的新型数控系统。数控系统基于移动客户/Web服务器模式的结构,它的核心是把移动设备(掌上电脑和智能手机)引进来,将数控系统分为数控移动控制器(客户端)和数控设备控制器(固定在数控机床、机器人、AGV小车等数字化设备上的Web服务器)两部分,从而不仅彻底改变人依附于机器的传统人机界面(HMI)操作模式,而且用浏览器的统一人机界面代替传统的相互独立的人机界面(即传统的c/s模式下的客户端人机界面)。这样.只要有一个安装了Web浏览器的移动控制器。就可以操作任何数字化设备。
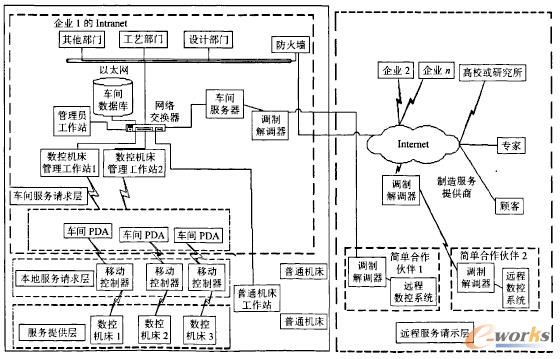
图3 Palm CNC网络拓扑结构图
(1)服务提供层
设备控制器作为Web服务器,支持ISO-OSI网络互联规范,具有很强的开放性。它通过蓝牙或者802.11等无线通信技术实现联网功能,向移动控制器或者其他网络用户提供Web服务。它支持标准的总线型、星型、环型等拓扑结构。从客户/服务器的角度看,过去的CNC仅通过接口与外界进行部分数据交换,是封闭的;数控系统从内部支持开放式系统互联规范,因而它是真正开放的。它的开放性体现在:建立在本身就具有开放性的PC资源基础上,软硬件资源丰富;支持ISO-OSI互联规范;数控系统支持Internet/ Intranet的wwW服务和WebBrowser浏览器浏览。
(2)本地服务请求层
移动控制器是数控系统重要组成部分,称其为本地服务请求者。本地服务请求者可通过两种方式访问机床控制器(Web服务器):若客户端具有Web浏览器,可通过浏览器访问统一的Web服务界面(它在客户端表现为网页形式);对于不支持Web浏览器的设备,可通过客户端程序(如WindowsForms)访问Web服务,这是一种非网页形式。
(3)车间服务请求层
数控系统的车间服务请求者主要是车间PDA和车间内部服务器。车间PDA不同于一般的掌上电脑和PDA,可以被抽象为调度Agent,和无线通信技术有机地结合起来,形成一个包括人在内的MAS车间控制系统,实现灵活而快速的判断、决策与控制。由于车间调度与控制具有复杂性和不确定性,所以掌握数控系统的工作状态、现场参数等很重要。
(4)远程服务请求层
任何远程设
数控系统移动设备CN 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)