CAN学习手记一
在这信息爆炸的年代,学习一样新的知识,尤其是IT技术的学习,网络是必不可少的。一阵狂搜过后,发现基于CAN总线的介绍确实不少,但是大多好像都雷同了,也许是不断转贴的结果吧。而且这些知识点也都太零散了,让人看了,尤其是初学者有点找不着北的感觉。所以,本着谦虚好学脚踏实地的菜鸟精神,决定把网上搜的,书上看的,再添油加醋的做一番比较系统的整理。算是为学习CAN总线理清思路,快速上手打基础吧。
一、什么是CAN总线?
CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。最初,CAN被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置。
一个由CAN 总线构成的单一网络中,理论上可以挂接无数个节点。实际应用中,节点数目受网络硬件的电气特性所限制。例如,当使用Philips P82C250作为CAN收发器时,同一网络中允许挂接110个节点。CAN 可提供高达1Mbit/s的数据传输速率,这使实时控制变得非常容易。另外,硬件的错误检定特性也增强了CAN的抗电磁干扰能力。
二、CAN 总线是如何发展的?
CAN最初出现在80年代末的汽车工业中,由德国Bosch公司最先提出。当时,由于消费者对于汽车功能的要求越来越多,而这些功能的实现大多是基于电子操作的,这就使得电子装置之间的通讯越来越复杂,同时意味着需要更多的连接信号线。提出CAN总线的最初动机就是为了解决现代汽车中庞大的电子控制装置之间的通讯,减少不断增加的信号线。于是,他们设计了一个单一的网络总线,所有的外围器件可以被挂接在该总线上。1993年,CAN 已成为国际标准ISO11898(高速应用)和ISO11519(低速应用)。
CAN是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。当信号传输距离达到10Km时,CAN 仍可提供高达50Kbit/s的数据传输速率。
由于CAN总线具有很高的实时性能,因此,CAN已经在汽车工业、航空工业、工业控制、安全防护等领域中得到了广泛应用。
三、CAN 总线是如何工作的?
CAN通讯协议主要描述设备之间的信息传递方式。CAN层的定义与开放系统互连模型(OSI)一致。每一层与另一设备上相同的那一层通讯。实际的通讯发生在每一设备上相邻的两层,而设备只通过模型物理层的物理介质互连。CAN的规范定义了模型的最下面两层:数据链路层和物理层。下表中展示了OSI开放式互连模型的各层。应用层协议可以由CAN用户定义成适合特别工业领域的任何方案。已在工业控制和制造业领域得到广泛应用的标准是DeviceNet,这是为PLC和智能传感器设计的。在汽车工业,许多制造商都应用他们自己的标准。
7 | 应用层 | 最高层。用户、软件、网络终端等之间用来进行信息交换。如:DeviceNet |
6 | 表示层 | 将两个应用不同数据格式的系统信息转化为能共同理解的格式 |
5 | 会话层 | 依靠低层的通信功能来进行数据的有效传递。 |
4 | 传输层 | 两通讯节点之间数据传输控制。操作如:数据重发,数据错误修复 |
3 | 网络层 | 规定了网络连接的建立、维持和拆除的协议。如:路由和寻址 |
2 | 数据链路层 | 规定了在介质上传输的数据位的排列和组织。如:数据校验和帧结构 |
1 | 物理层 | 规定通讯介质的物理特性。如:电气特性和信号交换的解释 |
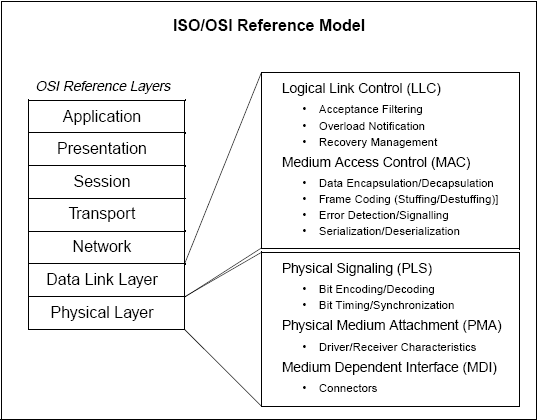
表1 OSI开放系统互连模型
CAN能够使用多种物理介质,例如双绞线、光纤等。最常用的就是双绞线。信号使用差分电压传送,两条信号线被称为“CAN_H”和“CAN_L”,静态时均是2.5V左右,此时状态表示为逻辑“1”,也可以叫做“隐性”。用CAN_H比CAN_L高表示逻辑“0”,称为“显形”,此时,通常电压值为:CAN_H = 3.5V 和CAN_L = 1.5V。
四、CAN 有哪些特性?
CAN具有十分优越的特点,使人们乐于选择。这些特性包括:
1、低成本;
2、极高的总线利用率;
3、很远的数据传输距离(长达10Km);
4、高速的数据传输速率(高达1Mbit/s);
5、可根据报文的ID决定接收或屏蔽该报文;
6、可靠的错误处理和检错机制;
7、发送的信息遭到破坏后,可自动重发;
8、节点在错误严重的情况下具有自动退出总线的功能;
9、报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
五、Philips制造的CAN芯片有哪些?
类别 | 型号 | 备注 |
CAN微控制器 | P87C591 | 替代P87C592 |
CAN独立控制器 | SJA1000 | 替代82C200 |
CAN收发器 | PCA82C250 | 高速CAN收发器 |
PCA82C251 | 高速CAN |
CAN学习手 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)