CAN学习手记一
志和超载界定符。
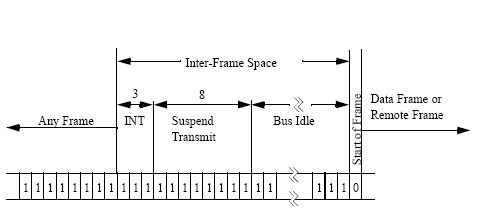
图1 帧起始位
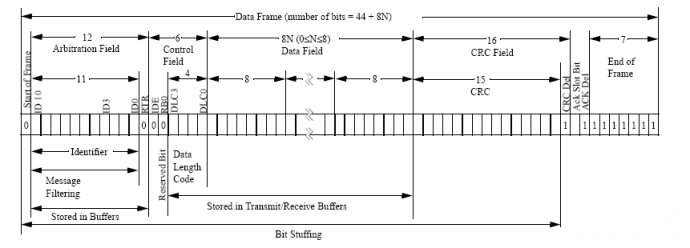
图2 标准数据帧格式
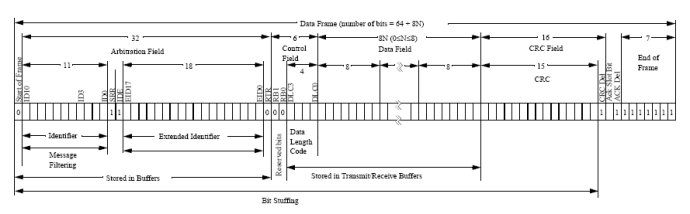
图3 扩展数据帧格式
由图2和图3可以看到数据帧的两种不同格式,两种格式的差别只是它们的ID位数不同。
1、帧起始。
2、仲裁场,仲裁场包括标识符和远程发送请求位(RTR)。
3、控制场,控制场由6个位组成,说明数据帧中有效数据的长度。标准帧的最高位是IDE位,扩展帧的最高位是保留位RB1,它们的次高位都是保留位RB0。低四位是DLC(Data Length Code)位,标识传送的数据字节数(0-8字节)。
4、数据场,数据场由数据帧中的发送数据组成。它可以为0-8个字节。
5、CRC场,CRC场包括CRC序列,这部分由SJA1000控制芯片完成。
6、应答场,应答场长度为两个位,包括应答间隙和应答界定符。由SJA1000控制芯片自动完成。
7、帧结束,每一个数据帧和远程帧均由一标志序列界定,这个标志序列由7个“隐性”位组成。这部分由SJA1000控制芯片自动完成。
仲裁场、控制场、数据场由软件编程配置SJA1000完成;帧起始、CRC场、应答场、帧结束由CAN总线控制芯片SJA1000自动完成。
十、CAN的数据错误检测:
不同于其它总线,CAN协议不能使用应答信息。事实上,它可以将发生的任何错误用信号发出。CAN协议可使用五种检查错误的方法,其中前三种为基于报文内容检查。
1、循环冗余检查(CRC)
在一帧报文中加入冗余检查位可保证报文正确。接收站通过CRC可判断报文是否有错。
2、帧检查
这种方法通过位场检查帧的格式和大小来确定报文的正确性,用于检查格式上的错误。
3、应答错误
如前所述,被接收到的帧由接收站通过明确的应答来确认。如果发送站未收到应答,那么表明接收站发现帧中有错误,也就是说,ACK场已损坏或网络中的报文无站接收。CAN协议也可通过位检查的方法探测错误。
4、总线检测
有时,CAN中的一个节点可监测自己发出的信号。因此,发送报文的站可以观测总线电平并探测发送位和接收位的差异。
5、位填充
一帧报文中的每一位都由不归零码表示,可保证位编码的最大效率。然而,如果在一帧报文中有太多相同电平的位,就有可能失去同步。为保证同步,同步沿用位填充产生。在五个连续相等位后,发送站自动插入一个与之互补的补码位;接收时,这个填充位被自动丢掉。例如,五个连续的低电平位后,CAN自动插入一个高电平位。CAN通过这种编码规则检查错误,如果在一帧报文中有6个相同位,CAN就知道发生了错误。
如果至少有一个站通过以上方法探测到一个或多个错误,它将发送出错标志终止当前的发送。这可以阻止其它站接收错误的报文,并保证网络上报文的一致性。当大量发送数据被终止后,发送站会自动地重新发送数据。作为规则,在探测到错误后23个位周期内重新开始发送。在特殊场合,系统的恢复时间为31个位周期。
但这种方法存在一个问题,即一个发生错误的站将导致所有数据被终止,其中也包括正确的数据。因此,如果不采取自监测措施,总线系统应采用模块化设计。为此,CAN协议提供一种将偶然错误从永久错误和局部站失败中区别出来的办法。这种方法可以通过对出错站统计评估来确定一个站本身的错误并进入一种不会对其它站产生不良影响的运行方法来实现,即站可以通过关闭自己来阻止正常数据因被错误地当成不正确的数据而被终止。
6、CAN可靠性
为防止汽车在使用寿命期内由于数据交换错误而对司机造成危险,汽车的安全系统要求数据传输具有较高的安全性。如果数据传输的可靠性足够高,或者残留下来的数据错误足够低的话,这一目标不难实现。从总线系统数据的角度看,可靠性可以理解为,对传输过程产生的数据错误的识别能力。
残余数据错误的概率可以通过对数据传输可靠性的统计测量获得。它描述了传送数据被破坏和这种破坏不能被探测出来的概率。残余数据错误概率必须非常小,使其在系统整个寿命周期内,按平均统计时几乎检测不到。计算残余错误概率要求能够对数据错误进行分类 ,并且数据传输路径可由一模型描述。如果要确定CAN的残余错误概率,我们可将残留错误的概率作为具有80~90位的报文
CAN学习手 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)