基于PLC的模糊神经网络算法实现方法
场工作过程实现
当学习阶段结束后,通过现场采集数据,建立数据库并把采集的数据当做输人,运用训练好的权值和模糊神经网络算法,得到控制对象所需的控制值。要实现以上工作步骤。仍然需要上下位机合作,故而程序设计分为上位机和下位机两部分。
3.2.1上位机程序实现
现场工作中上位机程序设计功能与学习阶段相一致,主要区别;在学习阶段初始化的和需要给下位机传送的样本值变成了通过外接设备现场采集到的数值。在PLC程序的初始化中,把采集值从外接设备的地址中赋值到发送区的数据区。(http://www.diangon.com/版权所有)因为采集值是在一定的周期内变化的,所以是实时的。故无需地址指针使两者工作同步。
3.2.2下位机程序实现
由图5现场工作过程中下位机程序流程可知.下位机在现场工作过程中的具体步骤:
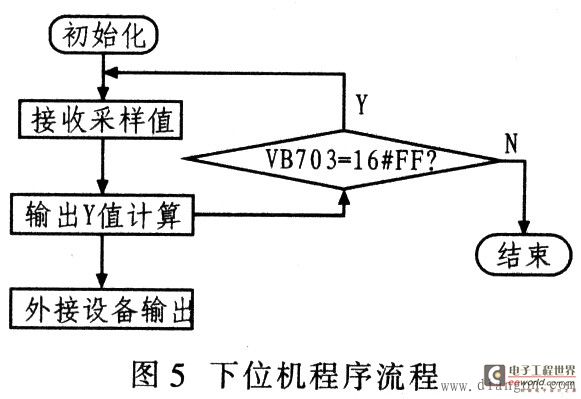
(1)初始化下位机初始化首先要把学习过程训练好的θji、σji、η的值,通过PLc指令把其赋给存储单元;其次要对后续Y值计算过程中用到的常数赋值,同样也要赋给存储单元;最后,要把请求数据传送的标志位VB703置位。并发送给上位机。
(2)接收采集值 首先接收上位机的采集值,接着把采集的值赋给即将进行Y值运算的储存地址。同时将请求数据传输标志位VB703复位,并传送给上位机,要求停止继续向下位机传输采集值。
(3)输出y值计算利用上一步提供的采集数据、初始化步骤中的权值和模糊神经网络算法,以PLC为平台进行计算,将计算所得值赋给外接输出设备的存储地址.同时根据现场情况控制请求数据接收标志位VB703是否置位。
(4)VB703判断若VB703=16#FF,那么启动新的数据接收,即跳转到第二步。如果VB703≠16#FF,则跳转到结束。但要知道的是这两种结果是工作人员根据现场情况在第3步中已确定的。现场工作过程中下位机主程序实现如图6所示。

4、结论
通过对模糊神经网络学习过程和现场工作过程的PLC程序的仿真,结果表明:学习过程的PLC程序,利用模糊神经网络自学习能力,当不满足性能指标时,系统则根据梯度下降策略自动的调整权值、隶属函数的和,直到输出满足要求为止。现场工作过程PLC程序,在采集值确定情况下.能够得出确定的输出值,达到预期效果。
PLC模糊神经网络算 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)