巨磁阻传感器原理及其应用
时间:12-19
来源:互联网
点击:

图4:惠斯通电桥
图5:磁性速度传感器应用
如前所述,巨磁阻传感器用于速度检测时,其磁场工作区间为线性区间,线性区间工作磁场强度大约在±5mT,因此在使用背磁方案时需要有磁路抑制技术用以减少平行磁场强度,避免巨磁阻感应单元达到饱和。
为了更方便巨磁阻速度传感器在非磁性轮的应用,英飞凌也提供集成背磁版本(Integrated Back Bias)的巨磁阻速度传感器,其背磁方式采用具有英飞凌相关专利技术的磁路抑制方案。
另外对于曲轴和凸轮轴等应用除了需要速度信息外,有时候还需要传感器提供位置信息。对于这类应用,需要特别注意的一点就是不能直接用巨磁阻传感器去替换霍尔传感器。因为根据其感应原理,差分式霍尔传感器信号在齿中切换,而巨磁阻传感器则在齿边沿切换。所以两种感应原理应用时存在着一定的相位偏移,这种相位偏移是不能够通过传感器硬件方式改变,只能通过软件方式进行调整。
相比于霍尔传感器,在速度检测方面巨磁阻传感器具有如下优点:
-更好相位精度及重复精度
-更高的灵敏度
-优异的气隙表现
-体积小
-更好的抗噪声能力
-工作温度范围更广
-成本低:可以使用便宜的磁性材料如铁磁性材料,相比霍尔传感器常用到的钕铁硼、钐钴等稀土材料,能减少相应成本。
2.角度检测
当巨磁阻传感器工作在磁场饱和区时可用于角度检测,巨磁阻感应单元阻值会随着外界磁场方向改变而改变。如图6所示为巨磁阻角度传感器感应单元结构,四个独立的巨磁阻感应单元组成一个惠斯通电桥,箭头方向代表参考层磁化方向。对于单核角度传感器总共有两个惠斯通电桥分别用来检测磁场正弦和余弦变化。其中VX代表输出余弦信号,而VY代表输出正弦信号。正弦或者余弦信号只能检测180°范围,通过正弦和余弦信号求正切值,再反正切计算后便可以检测360°范围的角度变化。
对于一些需要提供冗余设计的系统,英飞凌提供双核版本角度传感器。双核版本角度传感器其感应单元组成的惠斯通电桥组在结构上平行于感应平面X,Y轴,同心轴向垂直于Z轴,其巨磁阻感应单元结构大小相同,仅仅在Z轴方向存在一定气隙。这样的设计能够很好地确保同一感应平面上磁场变化方向相同,更好地保证了双核角度传感器数据准确性以及可靠性。
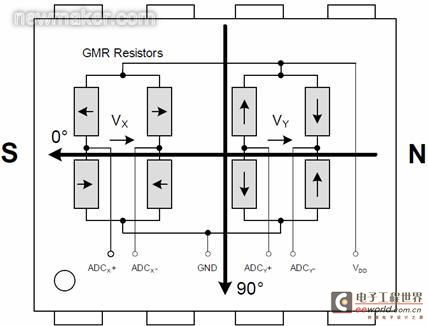
图6:巨磁阻角度传感器感应单元
巨磁阻角度传感器需要工作在合适的磁场强度,以TLE5012B为例,工作在-40℃至150℃下外部磁场强度规定为30mT至50mT范围。外部磁场强度过小或者过大都会增加额外的角度误差。如图7所示,绿色代表外部磁场,蓝色代表自由层磁化方向,红色代表参考层磁化方向。当外部磁场强度太弱时,会导致自由层磁化方向不能够很好地对齐外部磁场方向。当外部磁场强度太强时,会影响到参考层磁化方向。外界磁场强度过强并不会造成芯片的损坏,只是会影响检测精度,当外界磁场强度恢复到规定范围内时,检测精度又能够恢复到正常范围。
图7:外部磁场强度对巨磁阻角度传感器影响
综上所述,英飞凌能够为汽车领域应用提供基于巨磁阻效应传感器,可用于速度检测和角度检测,其感应单元和信号处理单元被集成到一个芯片上,可提供更小体积以及优异性能。巨磁阻传感器具有体积小,灵敏度高,线性度好,温度范围高,耐恶劣环境,成本低等特点,将会越来越广泛地被用于各个领域。
巨磁阻传感器霍尔效应磁阻效 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)