巨磁阻传感器原理及其应用
时间:12-19
来源:互联网
点击:
目前磁性传感器在汽车领域应用中主要有霍尔效应,各项异性磁阻效应,巨磁阻效应以及穿遂磁阻效应。英飞凌是少数几个同时掌握磁性感应技术并应用于产品中的半导体公司之一。
磁性传感器广泛应用于现代汽车中,如速度检测,角度检测,位置检测,电流检测等。根据磁性感应原理,可分为霍尔原理及磁阻原理。其中磁阻式根据原理又可分为常磁阻效应(Ordinary Magneto Resistance, OMR)、各项异性磁阻效应(Anisotropic Magneto Resistance,AMR)、巨磁阻效应(Giant Magneto Resistance,GMR)、超巨磁阻效应(Colossal Magneto Resistance,CMR)、穿遂磁阻效应(Tunnel Magneto Resistance,TMR)、巨磁阻抗效应(Giant Magneto impedance,GMI)以及特异磁阻效应(Extraordinary Magneto Resistance,EMR)等。
目前磁性传感器在汽车领域应用中主要有霍尔效应,各项异性磁阻效应,巨磁阻效应以及穿遂磁阻效应。英飞凌是少数几个同时掌握有以上磁性感应技术并应用于产品中的半导体公司之一。
相比于霍尔效应和各项异性磁阻效应,巨磁阻效应具有更好的灵敏度,更小的噪声以及气隙表现,非常适合汽车领域中需要高精度以及较大工作气隙要求的应用。目前英飞凌巨磁阻系列传感器涵盖速度及角度应用,本文主要介绍巨磁阻传感器原理及其在速度检测和角度检测方面应用。
集成巨磁阻原理
所谓磁阻效应是指导体或半导体在磁场作用下其电阻值发生变化的现象,巨磁阻效应在1988年由彼得•格林贝格(Peter Grünberg)和艾尔伯•费尔(Albert Fert)分别独立发现,他们因此共同获得2007年诺贝尔物理学奖。研究发现在磁性多层膜如Fe/Cr和Co/Cu中,铁磁性层被纳米级厚度的非磁性材料分隔开来。在特定条件下,电阻率减小的幅度相当大,比通常磁性金属与合金材料的磁电阻值约高10余倍,这一现象称为“巨磁阻效应”。
巨磁阻效应可以用量子力学解释,每一个电子都能够自旋,电子的散射率取决于自旋方向和磁性材料的磁化方向。自旋方向和磁性材料磁化方向相同,则电子散射率就低,穿过磁性层的电子就多,从而呈现低阻抗。反之当自旋方向和磁性材料磁化方向相反时,电子散射率高,因而穿过磁性层的电子较少,此时呈现高阻抗。
如图1所示,两侧蓝色层代表磁性材料薄膜层,中间橘色层代表非磁性材料薄膜层。绿色箭头代表磁性材料磁化方向,灰色箭头代表电子自旋方向,黑色箭头代表电子散射。左图表示两层磁性材料磁化方向相同,当一束自旋方向与磁性材料磁化方向都相同的电子通过时,电子较容易通过两层磁性材料,因而呈现低阻抗。而右图表示两层磁性材料磁化方向相反,当一束自旋方向与第一层磁性材料磁化方向相同的电子通过时,电子较容易通过,但较难通过第二层磁化方向与电子自旋方向相反的磁性材料,因而呈现高阻抗。
如上文所说,巨磁阻电阻值取决于自由层和参考层之间磁场方向夹角,自由层磁化方向会随着外界磁场方向改变而改变。巨磁阻传感器磁场工作区间如图3所示,当外界磁场强度超过|BK|时巨磁阻传感器工作在饱和区,此时自由层和参考层磁化方向平行,进一步增加外界磁场强度不会导致电阻值变化。当外界磁场强度范围在- BK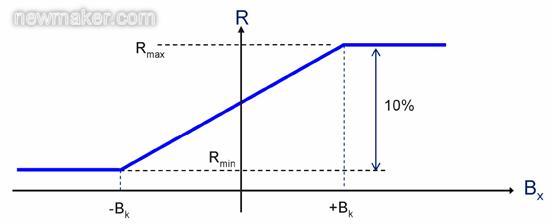
图3:GMR磁场工作区间特性曲线通常外界磁场强度BK为5mT时,巨磁阻阻值变化率在10%左右。磁场线性区间用于速度检测,而饱和区间则用于角度检测。
1.速度检测
巨磁阻速度传感器在汽车领域可以用于ABS、变速箱、凸轮和曲轴等速度及位置检测。
巨磁阻传感器其感应单元由四个巨磁阻单元组成一个惠斯通电桥,如图4所示为惠斯通电桥结构,每一个半桥包含两个巨磁阻单元,两个半桥之间距离通常为2.5mm(为了适应较小齿距轮速目标轮,TLE5041PlusC差分感应单元间距离为2.0mm)用于产生差分速度信号。如果需要检测目标轮转动方向,则可以在正中间增加第5个巨磁阻单元。方向信号和速度信号存在90°的相位偏移,通过比较速度信号和方向信号之间相位,可以判断目标轮转向,从而输出相应PWM信息用来反映目标轮转动方向。
根据图4惠斯通电桥结构,很容易得出如下等式:
差分速度信号Vsig=Vp-Vn=Vb*R4/(R3+R4)-Vb*R2/(R1+R2) 式3-1
方向信号Vcenter=Icenter*R5 式3-2
磁性传感器广泛应用于现代汽车中,如速度检测,角度检测,位置检测,电流检测等。根据磁性感应原理,可分为霍尔原理及磁阻原理。其中磁阻式根据原理又可分为常磁阻效应(Ordinary Magneto Resistance, OMR)、各项异性磁阻效应(Anisotropic Magneto Resistance,AMR)、巨磁阻效应(Giant Magneto Resistance,GMR)、超巨磁阻效应(Colossal Magneto Resistance,CMR)、穿遂磁阻效应(Tunnel Magneto Resistance,TMR)、巨磁阻抗效应(Giant Magneto impedance,GMI)以及特异磁阻效应(Extraordinary Magneto Resistance,EMR)等。
目前磁性传感器在汽车领域应用中主要有霍尔效应,各项异性磁阻效应,巨磁阻效应以及穿遂磁阻效应。英飞凌是少数几个同时掌握有以上磁性感应技术并应用于产品中的半导体公司之一。
相比于霍尔效应和各项异性磁阻效应,巨磁阻效应具有更好的灵敏度,更小的噪声以及气隙表现,非常适合汽车领域中需要高精度以及较大工作气隙要求的应用。目前英飞凌巨磁阻系列传感器涵盖速度及角度应用,本文主要介绍巨磁阻传感器原理及其在速度检测和角度检测方面应用。
集成巨磁阻原理
所谓磁阻效应是指导体或半导体在磁场作用下其电阻值发生变化的现象,巨磁阻效应在1988年由彼得•格林贝格(Peter Grünberg)和艾尔伯•费尔(Albert Fert)分别独立发现,他们因此共同获得2007年诺贝尔物理学奖。研究发现在磁性多层膜如Fe/Cr和Co/Cu中,铁磁性层被纳米级厚度的非磁性材料分隔开来。在特定条件下,电阻率减小的幅度相当大,比通常磁性金属与合金材料的磁电阻值约高10余倍,这一现象称为“巨磁阻效应”。
巨磁阻效应可以用量子力学解释,每一个电子都能够自旋,电子的散射率取决于自旋方向和磁性材料的磁化方向。自旋方向和磁性材料磁化方向相同,则电子散射率就低,穿过磁性层的电子就多,从而呈现低阻抗。反之当自旋方向和磁性材料磁化方向相反时,电子散射率高,因而穿过磁性层的电子较少,此时呈现高阻抗。
如图1所示,两侧蓝色层代表磁性材料薄膜层,中间橘色层代表非磁性材料薄膜层。绿色箭头代表磁性材料磁化方向,灰色箭头代表电子自旋方向,黑色箭头代表电子散射。左图表示两层磁性材料磁化方向相同,当一束自旋方向与磁性材料磁化方向都相同的电子通过时,电子较容易通过两层磁性材料,因而呈现低阻抗。而右图表示两层磁性材料磁化方向相反,当一束自旋方向与第一层磁性材料磁化方向相同的电子通过时,电子较容易通过,但较难通过第二层磁化方向与电子自旋方向相反的磁性材料,因而呈现高阻抗。
图1:巨磁阻效应示意图
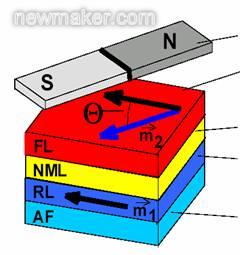
图2:巨磁阻磁性感应层结构

如上文所说,巨磁阻电阻值取决于自由层和参考层之间磁场方向夹角,自由层磁化方向会随着外界磁场方向改变而改变。巨磁阻传感器磁场工作区间如图3所示,当外界磁场强度超过|BK|时巨磁阻传感器工作在饱和区,此时自由层和参考层磁化方向平行,进一步增加外界磁场强度不会导致电阻值变化。当外界磁场强度范围在- BK
图3:GMR磁场工作区间特性曲线通常外界磁场强度BK为5mT时,巨磁阻阻值变化率在10%左右。磁场线性区间用于速度检测,而饱和区间则用于角度检测。
1.速度检测
巨磁阻速度传感器在汽车领域可以用于ABS、变速箱、凸轮和曲轴等速度及位置检测。
巨磁阻传感器其感应单元由四个巨磁阻单元组成一个惠斯通电桥,如图4所示为惠斯通电桥结构,每一个半桥包含两个巨磁阻单元,两个半桥之间距离通常为2.5mm(为了适应较小齿距轮速目标轮,TLE5041PlusC差分感应单元间距离为2.0mm)用于产生差分速度信号。如果需要检测目标轮转动方向,则可以在正中间增加第5个巨磁阻单元。方向信号和速度信号存在90°的相位偏移,通过比较速度信号和方向信号之间相位,可以判断目标轮转向,从而输出相应PWM信息用来反映目标轮转动方向。
根据图4惠斯通电桥结构,很容易得出如下等式:
差分速度信号Vsig=Vp-Vn=Vb*R4/(R3+R4)-Vb*R2/(R1+R2) 式3-1
方向信号Vcenter=Icenter*R5 式3-2
巨磁阻传感器霍尔效应磁阻效 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)