CAN 收发器的聚合挑战,飞思卡尔有妙招
每一种创新都有助于确保并且增强CAN的使用性能,提高效率或增加传输速率,如今这些创新相互组合,又需要解决各种全新的挑战。
在汽车网络领域,通信标准已经向前迈出了重大一步,电子设备延伸到各种汽车平台。自从1980年控制器局域网(CAN)创建以来,它便在一直适应发展,解决了这个行业的带宽、可靠性和低功耗等方面的各种挑战。
各种市场都采用了CAN拓扑技术。CAN最初的开发目的是为了支持汽车市场,随着获得汽车5大领域(动力总成、底盘、安全、车身和车载信息娱乐系统)的大范围认可,CAN如今已经应用于众多其它领域(重型车辆——基于J1939的解决方案、农业机械——ISO 11783,又称Isobus、航天系统——Arinc 825/6、移动设备、医疗和不断发展壮大、采用CANopen EN50325-4和CANopen安全标准EN 50325-5的工厂自动化应用)。
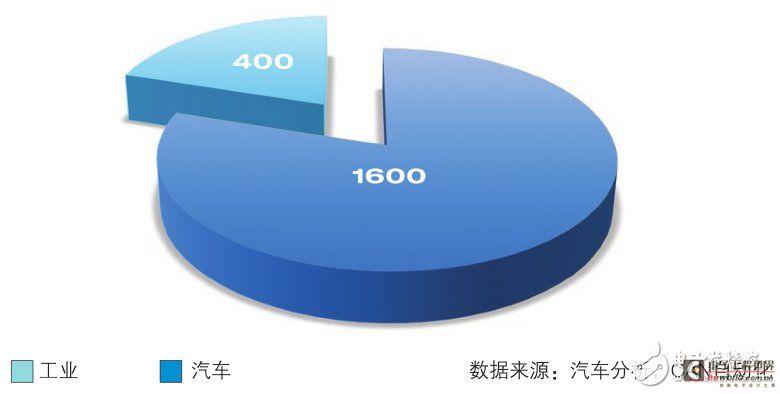
到2015年将会达到20亿个节点(80%的节点属于汽车市场,其它属于工业市场),CAN会成为最大规模工业网络标准的组成部分,并在对成本和可靠性敏感的应用中受到越来越多的关注。
CAN市场细分,单位百万(2015年)
CAN的优势有多种:由基于全差分结构,可以用于系统间通信 ,降低了噪声干扰;它还可以作为即插即用解决方案,提供灵活的带宽。此外,由于通过行业规范的认可和兼容性一致性测试(电气和EMC/ESD),大幅提高了物理层对外部干扰的抵抗能力和内部噪声的抑制能力。CAN收发器的这些新的技术革命带来了他的使用更加简单、快速和强健。
这种标准化的进程有利于CAN总线技术在市场上的快速增长,降低了这种技术解决方案的整体成本。
如今,为了适应更快通信换速率的行业发展趋势,以及降低网络能耗的需求,由此推出了新的标准。
CAN PN(partial networking) (ISO11898-6)支持选择性唤醒,在物理层内部可以存储并检查ECU唤醒。其次,另一个问题便是需要提高带宽,CAN FD确保了在传输期间实现更快的波特率和更高的数据量。
提高网络级的带宽可以延迟向更高波特率网络的过渡,并且成本更低(与FlexRay或者以太网相比),提供中间系统解决方案,满足更高通信速率的需求。
这样的演变需要物理层做出相应的调整以适应每一种市场的需求,而且需要将各种架构加以整合,以便维持强劲的性能。
CAN高速物理层和提高带宽的挑战
如今大部分汽车CAN使用速率为500 kb/s。只有少数应用的运行速率达到1 Mb/s,但它们会面临严重的技术限制条件,例如网络长度和节点数量,CAN FD允许提高CAN帧数据段的比特率,并且可以扩大传输数据字节的数量,同时数据帧起始段(ID,DLC)与现行的波特率保持一致大多数情况下为500 kb/s。这从整体上有助于提高CAN协议的效率,同时确保运行现有的CAN网络拓扑技术(长度、存节点、终端概念)。
在最初发布时,CAN FD协议和技术规范声称其可以使用现有的CAN收发器,尽管运行速率可高达8 Mb/s。但是,深入分析ECU和主要的CAN收发器设备在最终应用环境(例如EMC)中应该满足的要求、环境和技术规范,所得结论是:至少需要对CAN收发器实施一定的优化,最终大幅改变收发器的理念或设计,从而全面符合可变速率的技术规范。
关于EMC,辐射干扰或传导干扰取决于信号完整性和CAN信号的波形。然而,CAN传输波特率(即500 kb/s)衍生出的基波和谐波在整个频谱范围内都是清晰可见的。
为了提高CAN FD波特率,部分比特数据通过更高波特率传输,这会导致谐波“移动”到更高频率的频谱范围。
在这些频率下,要求具有极低的干扰,如果没有外部滤波组件或内在的设计改进,CAN FD收发器将难以满足这些需求。以下波形展示介绍了500 kb/s和2 Mb/s速率时典型的CAN接口频谱图,未采用外部滤波器。数值根据IEC61967 [8]标准测量获得。在CAN FD2 Mb/s的速率下运行时产生的频率“位移”清晰可见。
MC33901在速率为500 kps和2 Mbps时的CAN干扰对比
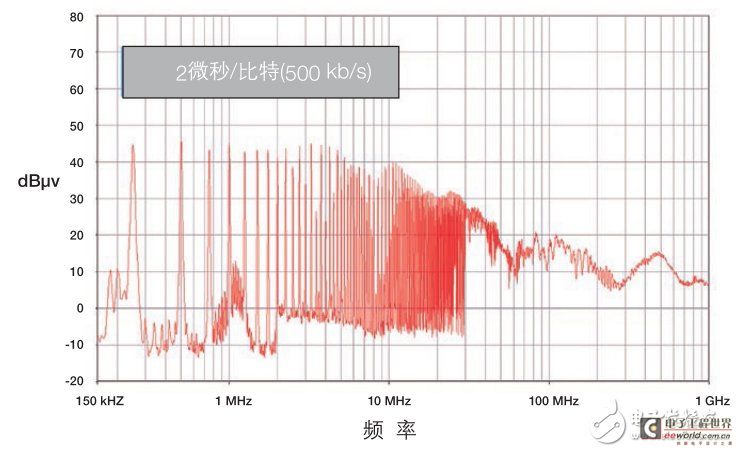

为了保持汽车市场的EMC等级要求,需要对 CAN驱动程序进行优化,CAN FD 的传输速率达到2MB/s是第一步,以后还会实现更高的传输速率。
本文选自电子发烧友网7月《汽车电子特刊》Change The World栏目,转载请注明出处!
CAN可靠性
MC33901CAN飞思卡 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)