CAN 收发器的聚合挑战,飞思卡尔有妙招
CAN物理层收发器的一个重大性能革命在于它实现了自身抵御系统噪声的干扰,无论有无外部的保护器件。在定义CAN物理层时需要考虑多种规范的需求。
为了解决这些挑战,在 (EME、EMI、ESD) 领域,利用先进的混合信号和电源技术SMARTMOS 8工艺,已经开发出一系列丰富多样的创新,以便实现系统可靠性的提升,并且无需外部扼流圈保护便可达到标准。
抗干扰设计:
CAN网络如同吸收电磁噪声的天线,它通过类似电动机、电磁阀、继电器这样负载切换或者通过外部来源生成。在CAN通信期间,当施加电磁噪声时,信号完整性不能被干扰。
这被称为电磁抗干扰(EMI)。主要采用两种EMI测试模拟以验证物理层的可靠性:分别是直接功率注入法(IEC62132-4)和大电流注入法(ISO11452-4) [2]。
在外部EMC的入侵下,MCU TxD和RxD终端之间数据的传输和接收的信号应该在一定范围内震荡。随着传输速率的提高,数据的保持时间会减少,所能接受的信号震荡容限范围会随之降低这需要CAN收发器具备出色的EMC性能。
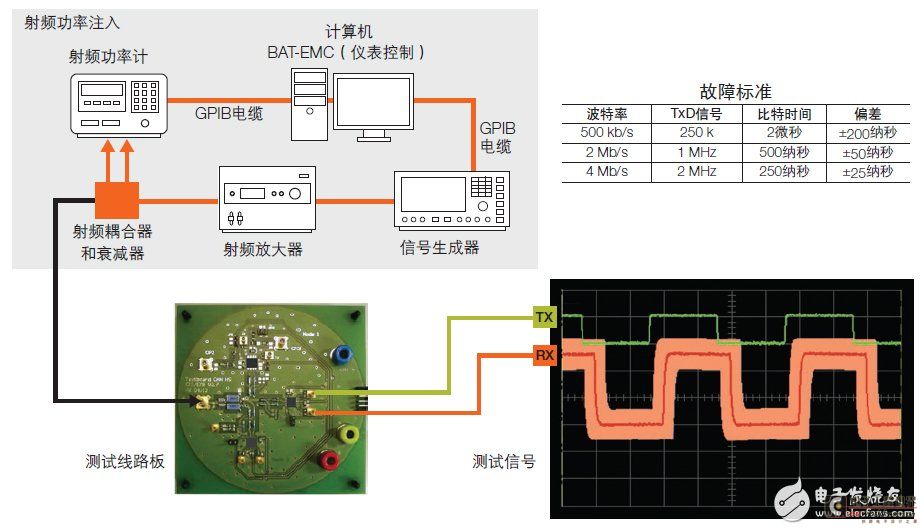
下图为EMC测试原理的简化图,通过耦合电容器施加射频干扰,同时收发器向总线传输数据。监控收发器RxD信号,并与信号模板对比,它包含了允许的电压和时序偏差(抖动)的典型信号。这种波动会变得越来越小,以适应CAN FD的运行。
EMC测试设置和容差范围简化示意图
在物理层中,可以提供完整的EMC设计流程,包括准确的设计和布局指南、丰富的模块级和顶层单元级仿真以及EMC仿真内部运行中包括了工艺和温度变量在内的各种模型,从而针对技术规范确保一定程度内的余量。由此,这些设计的改进确保了CAN信号完整性,支持信号注入量达到39 dBm。
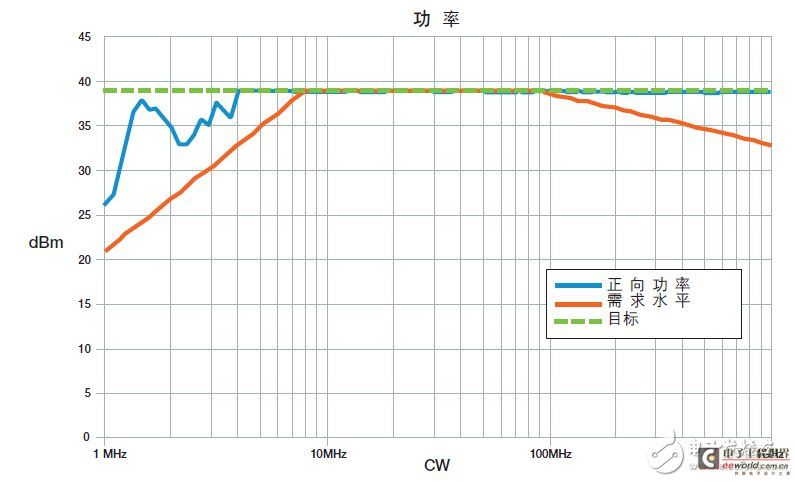
通过CAN FD使用案例,不受EMC的限制,部分传播延迟还可以经过优化,从而实现更高波特率的运行。这种物理层设计的演变对抗干扰性产生了影响,允许的抖动窗口变得越来越小。噪声敏感度也因此增强,设计需要更高的抗干扰解决方案。下图展示了在2 Mb/s的使用案例情况下,飞思卡尔MC33901 CAN高速物理层通过了DPI注入的性能。
MC33901/MC34901 – 带有扼流圈时的直接功率注入CAN,2 Mb/s
凭借高ESD性能提高系统可靠性:
物理层有专门的设计用于承受IC级和系统级定义的最严格ESD标准。它通过了AEC Q-100文档中的规定ESD测试:人体模型(HBM) +-10 kV、机器模型(MM) +-200 V和带电设备模型(CDM) +-750 V。此外,物理层经过优化,还通过了ISO10605:2008 [3]、IEC61000-4-2:2008 [4]、HMM(人人体金属模型)[5]定义的系统级压力测试。
ESD GUN可以用于重现人体处理电子系统子部件或者接触汽车/设备结构时静电放电的影响。测试物理层所用的标准为ISO10605:2008、EN 61000-4-2:2008技术规范,IC上电和未上电。在集成电路开发阶段必须考虑到所有这些标准,因为每一种标准的设置变量都会导致不同的抗压特性。
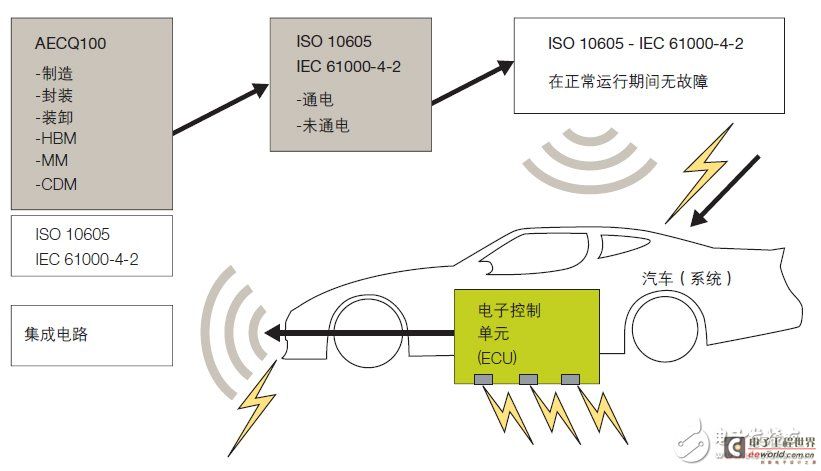
系统级到组件级的ESD技术规范
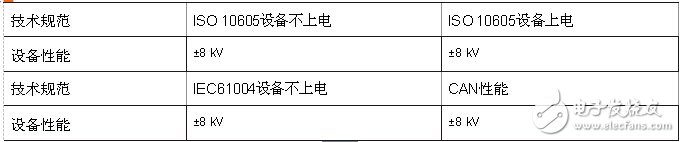
CAN H和CAN L引脚具有强大的抗静电电压等级,可以预防直接施加在引脚级的系统级压力,无论带或不带外部保护。为了获得这样的高性能(25 kV),采用了SEED [7]方法(系统高效ESD设计推广一种板载和片上芯片ESD保护的IC/OEM协同设计方法,从而获得系统级ESD)。下表归纳了一个飞思卡尔CAN高速物理层的ESD性能实例。
ESD性能汇总
高ESD和DPI的性能组合是对能量吸收的挑战,同时不可降低CAN通信速度。如上表所示,最新的CAN物理层旨在通过所有组件和系统ESD压力测试,同时对外部EMI干扰免疫,无论是否添加外部组件(例如扼流圈),并且处于最优的裸片区域内。所有这些创新构成物理层进一步集成(系统基础芯片(SBC)、ASSP、ASIC)的可靠性的基础。这些限制条件相互组合,是IC架构的基础所在,从而成功通过最终验收。
本文选自电子发烧友网7月《汽车电子特刊》Change The World栏目,转载请注明出处!
CAN和能源效率
由于CAN标准的演变和创新,可以实现系统级的电流和功耗管理。在汽车中未使用时通过禁用和激活低功耗模式,可以降低和优化整个系统的电流消耗。当然在必要情况下,ECU应当恢复运行。
如图所示,可以分析2个ECU、汽车泊车辅助和电子泊车制动的运行。当汽车的运行速度超过一定数值时(比如数千公里/小时),这些ECU就不再需要工作了。此时,这些ECU可以自行设置为低功耗模式,它们通过CAN网络和CAN报文接收车辆速度。当速度大于预先设定的阈值,这些ECU可以主动设置为低运行模式,禁用或关闭线路板组件(例如MCU或负载驱动器)的电源。只需最少的IC保持激活状态,用于监控CAN总线流量并检测特定的CAN报文或CAN的部
MC33901CAN飞思卡 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)