基于CAN总线的电子机械式制动系统电控单元的实现
使用IO接口通过驱动芯片控制电机的转动方向和对驱动芯片的发送PWM信号来控制力矩电机的力矩。
4.3 关键技术的实现方法
4.3.1 踏板行程采集
踏板行程传感器采用角位移传感器,通过主节点的模数转换接口模块采集模拟信号。由于刹车系统是汽车中比较关键的部分,对刹车装置的安全性要求较高,因此在踏板行程传感器的设计采用冗余的设计方法。这里的一种实现方法是设计两套传感器,对应某一行程时两套传感器产生的模拟电压值是二倍的关系,这样采集并计算得来的踏板行程值有很高的安全性。
4.3.2 踏板行程变化率计算
采用定时器方式,每隔固定时间计将当前踏板行程值与前一次踏板行程值作差,求得踏板行程的变化率。但为了减小抖动并使变化率曲线平滑些,可以采用公式(1)计算方式。
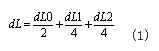
其中dL是要计算的变化率,dL0是本次计算得出的变化率,dL1、dL2分别是前二次的变化率值。
4.3.3 制动力的计算
由于在电子制动系统中,计算制动力的算法要求有较大的灵活性,如根据车型不同能够较方便更改算法参数。因此可以采用较灵活且对运算能力要求不是很高的模糊控制方法对踏板行程值和踏板行程变化率值来进行PWM输出值的计算,进而控制制动力。
具体算法如下:
①模糊化。
输入变量踏板行程L,论域为:{Z,PS,PM,PL}, 采用三角形隶属度函数,如图4所示。
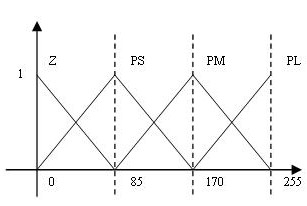
图4 踏板行程隶属度函数
输入变量踏板行程变化率dL,论域为:{NL,NS,Z,PS,PL},采用三角形隶属度函数,如图5所示。
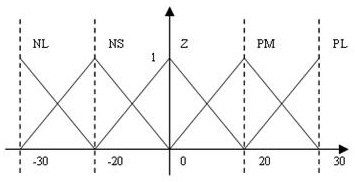
图5 踏板行程变化率隶属度函数
输出变量定义为要求解的PWM值,论域为:{Z,PS,PM,PL}。
模糊化变量是根据隶属度函数将输入变量值转换到论域中各元素的隶属度值。
②模糊推理:
当对两个输入变量模糊化后,下一步是根据推理规则表进行模糊化推理。
表1 模糊推理规则表
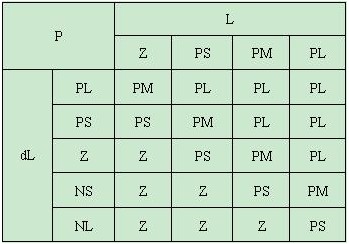
表中最左列是行程变化率dL对应的模糊化论域,最上行是行程L对应的模糊化论域。表中其它部分则是欲求解的PWM值对应的模糊化论域。
计算时,依次对表中间部分的每一个元素计算隶属度值,方法是将对应的L和dL的隶属度相乘。最后把相同的元素隶属度值相加,可得到一组输出变量的模糊化向量:(Z,PS,PM,PL)
③解模糊化:
根据下图PWM值的隶属度函数,采用来重心法来计算最终PWM输出值。
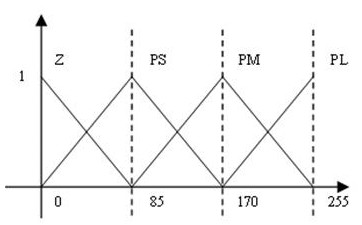
图6 输出PWM值隶属度函数
重心法计算公式如公式(2)所示。
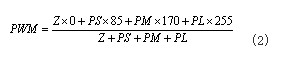
这样求得的精确值即为最终PWM输出值。
5、结论
本文采用目前流行的车载CAN总线网络以较简易的方式实现了EMB的基本功能,有着较高的实时性和时间响应性。采用网络式控制方式,将驱动电机的具体实现设置到终端,并采用处理能力较弱且价格较低的微控制器;而在主控端采用处理能力挺强价格相对较高的微控制器,提高了整体设计的合理性。在安全性控制方面采用了模糊控制方法,而模糊控制方法最大的特点就是有很强的灵活性,可以根据需要进行控制方法的灵活修改,使得制动器的制动方式更加合理。
本系统在浙江亚太机电股份有限公司的“汽车线控制动系统电控单元研究与开发”项目中已经过台架实验的验证其可行性。
CAN总线电子机械式制动系统电控单 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)