基于CAN总线的电子机械式制动系统电控单元的实现
随着机电技术的发展,电子技术也渗入到了汽车制动系统中,出现了称为“电子制动系统”的新技术。与传统的汽车制动系统不同,电子制动系统以电子元件替代了大部分液压和机械元件,减少了制动系统机械传动的滞后时间。它根据驾驶员进行制动操作时,踏板行程传感器探知驾驶员的制动意图,进而对各轮制动力进行精确的控制,缩短了制动距离,从而增加了交通安全性[1]。
2、EMB
线控制动系统目前分为两种类型,一种为电液制动系统EHB (Electro-hydraulic Brake),另一种为电子机械制动系统EMB (Electro-Mechanical Brake)[2]。本文主要讨论的内容是后者。
相比传统制动控制系统,电子机械式制动系统有如下优点[3]:
① 系统结构简单,省去大量管路系统及部件;
② 制动响应时间短,提高了制动性能;
③ 系统制造、装配、测试简单快捷,采用模块化结构,维护简单;
④ 采用电线连接,系统耐久性能良好;
⑤ 易于改进,略加变化即可增设各种电控制功能。
电子机械制动系统包含如下部分:
① 电源:采用车载电源。
② 电制动器:采用可连续堵转的力矩电机。
③ 电制动控制单元(ECU):由二部分构成,主控节点和从控节点。主控节点负责接收制动踏板传感器发出的信号,经过一定的算法计算,将数据发送给从节点,控制制动器制动;接收车轮传感器信号,识别车轮是否抱死、打滑等。从控节点负责接收发自主节点的数据报文,根据数据报文内容驱动力矩电机转动方向和转动力矩。
④ 轮速传感器:使用霍尔传感器在车轮转动过程中产生脉冲,由ECU采集。
3、EMB系统的硬件设计
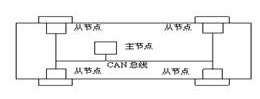
图1 系统示意图
3.1 主节点硬件结构
考虑到主节点需要处理的数据比较多,对响应的实时性要求比较高,因此采用运算能力较强的16位微控制器,这里我们采用了英飞凌公司的XC164CM8F40F。它采用高性能16位带5级流水线的C166S V2 CPU,提供较好的DSP性能和中断处理以及外设集和高性能可靠的片内闪存,40MHz CPU时钟的单指令时间25ns,以及16级优先中断系统多达75个中断源。
外设方面,它具有14路ADC,多功能通用计时器单元,片内TwinCAN接口,47个GPIO,通过JTAG接口支持在片调试等丰富的外设资源。
XC164CM内含两组共五个通用定时/计数器,使用其中一个作为定时器,用来计算车速和踏板行程变化率;使用其余四个作为计数器采集安装在车轮部的霍尔传感器发出的脉冲信号。
使用一路ADC采集踏板行程传感器的模拟电压值。CAN总线接口方面,片内TwinCAN模块支持CAN技术规范V2.0A/B,大大简化了CAN接口应用设计。使用片内TwinCAN模块中的一路CAN控制器,外接TLE6250作为CAN总线物理接口的收发,实现CAN总线通信。
3.2 系统从节点硬件结构
系统需要四个相同的从节点部分,且从节点要实现的功能相对简单,只需要从CAN总线接收数据报文,根据报文内容来控制电机的转动方向和力矩大小,因此可以采用带有片内CAN控制器价格较低的T89C51CC01微控制器。电机驱动芯片方面采用ST公司单封装的全桥电机驱动芯片VNH3SP30。芯片采用小型化封装,节省电路板空间、重量和成本。该产品特胜包括30A输出电流,40V最高工作电压,支持最高10KHz的脉宽调制操作。
4、EMB系统的软件设计
4.1 主节点软件设计
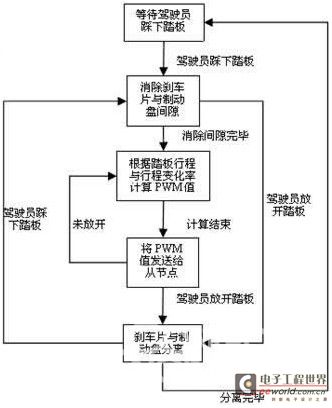
图2 主节点软件流程
程序首先等待驾驶员踩下踏板。由于非制动状态时刹车片与制动盘之间保留有一定距离,当驾驶员刚刚踩下跳板后,力矩电机需要迅速消除刹车片与制动盘之间的间隙。消除间隙后,程序要能根据踏板的行程来控制力矩电机输出的力矩。由于在消除了刹车片与制动盘之间的间隙后,力矩电机一直处于堵转状态,因此可以采用对力矩电机输出PWM信号脉宽调制的方式来精确控制力矩输出。
由于采用电子制动系统,使对驾驶员制动意图的监测成为可能。例如在发生紧急情况时,驾驶员会迅速踩下制动踏板,在传统的制动系统中,最大制动力是在踏板踩到最底时提供的。而在电子制动系统中,若发生紧急情况时,可能提前感知驾驶紧急制动意图,并在驾驶员未将制动踏板踩到最底时,即可提供最大制动力,这样可以大大增加制动安全性。基于上述考虑,制动力不能简单的和踏板行程相对应,需要采用智能化的模糊控制方法对制动力进行非线性控制。
当驾驶员完全放开制动踏板时,虽然此时无制动力提供,但刹车片和制动盘仍有接触,为了尽量减小拖滞扭矩,此时需要将刹车片离开制动盘一小段距离,这是与驾驶员踩下踏板时的消除间隙相对应的过程。
4.2 从节点软件设计
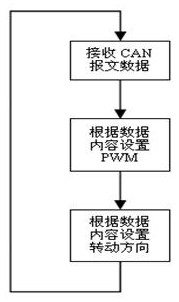
图3 从节点软件流程
从节点要完成的工作则相对简单,从节点只需要接收CAN总线发送过来的数据,并根据数据内容
CAN总线电子机械式制动系统电控单 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)