基于现场总线的可重构数控系统的研究
引言
数控系统的开放性、可重构设计、模块化、网络化是当前数控技术领域研究的热点。开放式数控的技术本质是标准化,它的目标是把复杂的数控技术产品体系分割开,形成公认的模块化构件,让更多的厂商能够参与到数控技术的广阔市场中来。显然,模块化是开放式控制的原始基础和技术雏形,而实现这一目标的前提是共同制定一个产品的标准,准确地说,就是制定一个共同遵循接口的标准,以实现庞大数控系统架构的分解和集成。
可重构数控的技术本质是柔性化。其实际上和原有的柔性制造系统一脉相承,只不过加入了管理学和运筹学的技术内容。不同的是,这种管理过程不是完全由人来主导,而是在人预先定义的决策下,由控制系统本身按照某种程度的自动化来实施的,其目标是系统实现从一种形态转变成另一种形态。重构后的系统,可适应新的制造环境,或提供更优化的效率,这正是柔性制造的核心内容。随着高集成度、高速度和具备硬件可重构能力的现场可编程门阵列(Field Programmable Gates Array,FPGA)器件的出现,利用其实现可重构数控系统是一条快速、简捷、可靠的途径。
随着工业现场环境和控制对象本身的日益庞杂,数控系统所包含的控制器、驱动器、输入输出模块、传感器、执行器之间需要更多的信息交互。采用传统的模拟通道和并行连线的方式,不仅使得数控系统整体结构复杂,而且在信息交互密集的控制任务下,实时性无法得到保证,由此造成了数控系统控制能力的不可靠。另一方面,一些已经具备独立性的功能模块迫切需要建立自己的处理运算体系,需要单独的控制器和运算器的支持,以一种全新的优化方式和拓扑结构融入到数控系统的功能框架中,形成具备网络特征的数控系统控制网络,以使得数控系统在功能实现、现场配置、资源优化方面适应生产过程自动化和控制流程自动化的柔性、复合型和综合处理能力等多方面的技术和应用需求。
由此,笔者提出了一种基于现场总线(Processfield bus—DP,PROFIBUS—DP)的可重构开放式数控系统。
1基于先进精简指令集微处理器和运动控制芯片的可重构数控系统平台的构建
1.1 基于先进精简指令集微处理器和运动控制芯片的数控系统的设计
由于采用精简指令集计算机(Reduced Instruc—tion Set Computer,RISC)架构的先进精简指令集微处理器(Advanced RISC Microprocessor,ARM)具有如下特点:①体积小、低功耗、低成本、高性能;②支持Thumb(16位)/ARM(32位)双指令集,能很好地兼容8位/16位器件;③大量使用寄存器,指令执行速度更快;④大多数数据操作都在寄存器中完成;⑤寻址方式灵活简单,执行效率高;⑥指令长度固定。因而,在本系统设计中,采用ARM的全数字式的控制,可以实现生产过程的数字化与高速高精度。
为缩短开发周期,提高控制性能和系统可靠性,在系统设计中采用了运动控制芯片MCX314AS。MCX314AS是性能优良、接口简单、编程简单且工作可靠的运动控制专用芯片,该芯片能够控制4轴,并实现4轴3联动的位置、速度、加速度等的运动控制和实时监控,可实现直线、圆弧和位元3种模式的轨迹插补。所有插补计算由芯片完成,且多轴插补控制功能特别突出。
系统硬件采用主从式双CPU结构模块化设计,分为基于ARM和现场总线的主控模块、基于MCX314AS的运动控制模块、基于FPGA的可配置模块、交互模块和网络模块。主CPU为ARM处理器,用于键盘、显示、文件存取、网络通讯等管理工作;而从CPU为MCX314AS运动控制芯片,专门负责完成复杂的运动控制的处理工作。
MCX314AS与ARM的通讯是靠读写总线上的几个地址来进行指令和数据的传输。图1为基于这种思想开发的数控系统结构框图。
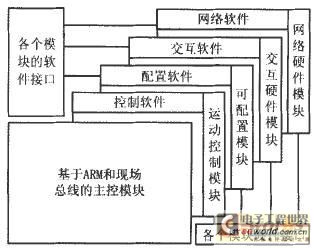
图1 主轻系统结构框图
1.2可重构制造系统的设计
可重构制造系统能够通过重组或改变自身部件,快速调整生产能力和功能,以适应新的生产环境需要。美国国家研究委员会(National ResearchCouncil)发表了题为《2020年制造业挑战设想》的报告,其中将可重构制造系统列为优先考虑的领域之一。对一个制造系统来说,要想满足系统重构要求,它的子系统或部件应具有重构能力,而作为制造系统的关键单元,数控系统也必须具备重构能力。就重构角度而言,把能够通过重组或改变自身构件,快速调整控制能力,以适应制造系统整体重构需要的数控系统称为可重构数控系统。在可重构数控系统的研究方面,国内外主要采用软件的途径,而随着FPGA的出现,利用其构造数控系统的控制内核,并充分利用它的硬件可重构性,实现数控系统功能的重构,是可重构数控系统硬件实现的一条途径。
按照文献
数控现场总线现场可编程门阵列可重 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)