轻松实现交互式机器人小车设计,提供软硬件设计指南
转换,再根据转换结果分析光的强弱。
3.1.2、视频语音采集模块
在本系统中我们暂时使用的是一般的免驱摄像头加CH374来获取的,但在EVK1105我们会考虑直接加驱动连接获取。对于语音的采集,虽然摄像头中内置了麦克风,但我们试验发现效果并不好,对于这一问题我们考虑用外置麦克风解决。
3.1.3、L298N电机驱动模块
具体原理图如下所示。这一模块主要用对小车速度和方向的控制,MCU只要为其提供2路PWM信号和两路方向信号即可。
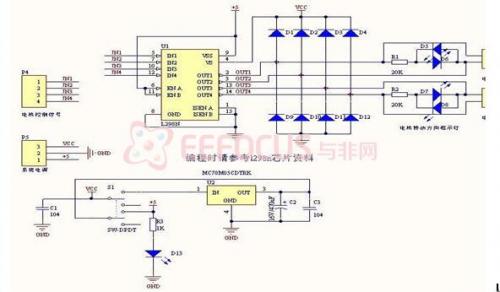
图(3):L298N电路原理图
3.1.4、太阳能充电模块
这一模块我们主要用滴胶太阳能电池板和DC-DC升压电路来实现。具体原理图如下所示:
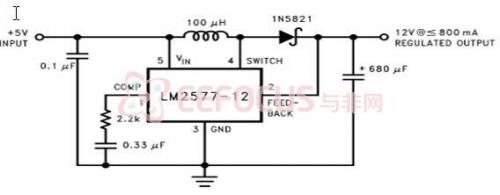
图(4):DC—DC升压电路
3.2 硬件平台选用及资源配置
由于考虑到本系统对视频和语音的要求比较高,因此我们选择具有强大的音频解码和流媒体处理能力的EVK1105硬件平台作为核心控制器,并且EVK1105在USB模块方面的配备和引导将为我们的设计提供极大的方便。在我们的交换式机器人小车中将EVK1105将作为一USB主机,通过相应USB驱动从摄像头中获取视频信号并由板上的液晶模块显示。同时USB还负责一个音响的控制,实现音频的播放。而我们的Wi-Fi模块主要依赖与EVK1105的网络拓展,通过EVK1105相关网络服务的引导,我们会构建一简单的Web Server,然后只需通过网络远程访问这个Web Server便可获取相关信息或对小车实行相应的控制。而我们的电机和舵机控制用的PWM信号将由AT32UC3A0512的相应I/O提供,传感器模块及其它相关输出操作则由普通I/O口完成。
3.3系统软件架构
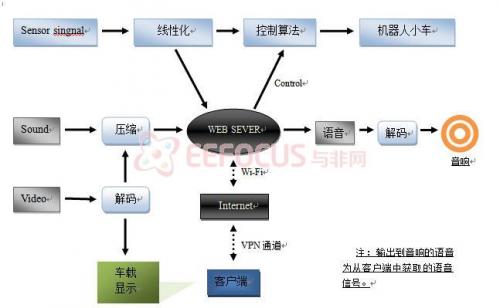
图(5):系统软件架构
3.4 系统软件流程
从流程图中可以看出我们的机器人小车在空闲时会自动寻找光源,当找到充足的光源后它充电的同时会进入睡眠模式,这样可以把能源的消耗降到最低。如果在这时有控制申请,系统会以中断的方式唤醒AT32UC3A0512。在进行系统远程登录操作时首先要通过身份验证,同时为了保证信息的安全我们还会为其配备专门的VPN通道。验证通过后,系统则自动将检测到得信息先处理,在进行打包发送。在视频显示环节,EVK1105板上显示器要同步显示。当信息发送完毕后,系统自动检测接受缓存区是否有数据。如有则接受相应信号,并对其进行分离,具体如上流程图所示。
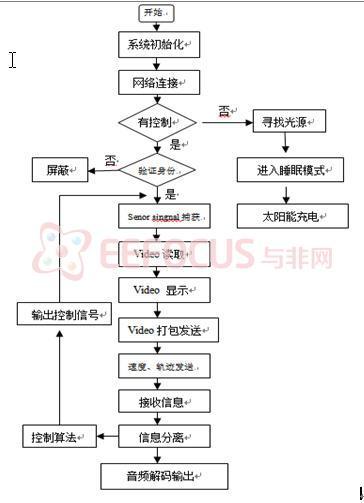
图(6):程序运行流程图
3.5 系统预计实现结果
在有网络的情况下,只需登录相应网页并通过身份验证,就可与机器人小车周围的人交谈。还可通过远程控制小车,观察小车周围的任意场景。小车的摄像头可以随着客户端鼠标的上下左右移动而一起移动,方便对任意角度的观察。控制时只需在接受的视频上移动鼠标点中想让小车到达的目的地,它便可自动到达。或者也可直接为它设置行进路径,就如一些游戏中目标的路径移动一样。在不对小车进行操作时,机器人小车会进入空闲模式。此时小车会根据时间判断是否自动寻找光源,当寻找到光源时小车则进入睡眠模式并进行充电。小车寻找目的地时可以自动辨别最优路径,在行进过程中如遇到障碍会自动躲避,如发生意外撞击则先归位再自行绕开。
交互式机器人小车 AT32UC3A0512 Wi-Fi模块 EVK1105 ADXL345 相关文章:
- 大热的餐桌点菜系统设计,拿来就用的解决方案(06-03)
- 基于手机远程遥控和物联网技术的智能家居控制系统,详细的软硬件架构(原理图、流程图、详细参数)(06-20)
- 农业温室大棚监控系统的整体设计方案(包括软硬件实现)(04-18)
- 轻松打造智能家庭卫士系统(原理,软硬件实现,器件选型)(04-11)
- DIY实现智能家居:智能家电语音控制系统的完整设计方案(05-14)
- 一种基于微加速度计的无线教鞭系统设计(07-22)