轻松实现交互式机器人小车设计,提供软硬件设计指南
一、项目概述
1.1 引言
交互式机器人小车主要是将语音的交互、视频的传送、动作的捕捉等功能结于一体,帮您实现视觉、听觉的拓展,无限缩短您与您家人的距离。它将采用具有超强的音频解码和流媒体处理能力的AT32UC3A0512作为核心;以Wi-Fi模块作为传输和控制的介质,从而有效保证媒体质量;用两驱三轮小车作为载体,充分确保小车定位与导航的灵活性。两块60mm*100mm左右的太阳能电池板,在阳光充足时可提供近2w左右的功率,让小车可以快速完成自动充电的过程。而自动寻光模块则解决了小车如何自动充电的问题,它主要由光敏传感器和微控制器中的蚁群算法构成,确保小车可以快速寻找到光源最充足的地方。
1.2 项目背景/选题动机
社会节奏越来越快,父母、孩子、工作似乎已很难兼顾,而我们的交互式机器人小车将为您排解这一忧虑。它可以让您无论身在何方都可与您的孩子进行互动式游戏;向您远在家乡的父母发出一声深情的问候;还可在家中巡视。当然现在家用机器人的安全问题已成为我们不得不面对的难题,我们的交互式机器人小车作为家用机器人中的一员,您可能也会发出它会不会泄露家庭隐私的疑问。在此我们不能保证绝对安全,但会为您构建专门的VPN通道,将我们的机器人小车的安全做到最好。同时在能源方面,我们设计的是太阳能充电和手动充电结合。在空闲模式时,机器人小车会自动寻光进行太阳能充电,这样可以基本省去您充电的麻烦。
二、需求分析
2.1 功能要求
①、对EVK1105上的USB进行设计,实现与常用免驱摄像头的直接连接,并从中完成高分辨率的视频图像的信息提取。
②、结合Wi-Fi模块和EVK1105板上的网络模块将我们的机器人小车连接到Internet上,当然在其中我们会申请VPN通道,从而确保信息的安全。
③、可以将视频和声音通过WiFi传到Internet上,同时可与对应客户端进行信息的传递。
④、可以实现即时语音通信,如QQ、MSN软件中的语言聊天
⑤、空闲时交互式机器人小车可以自动寻光,并利用太阳能电池板对电池充电
⑥、摄像头可以3自由度旋转,并实现互动式操作
⑦、小车可以自动定位和导航,自动躲避障碍,对障碍的盲区一般可控制到2cm范围以内。
⑧、当遇到撞击的情况,可通过振动传感器进行有效检测,再回到原位从新避过。
2.2 性能要求
充分利用EVK1105板上资源;可实现高清视频的获取及传送;可完成即时的语音交互,延时不超过1秒;可以直接越过3cm高的台阶;可以续航10小时,阳光充足时可实现6小时把电充满;铝合金打造坚不可摧,能承受高强度撞击。
三、方案设计
3.1 系统功能实现原理
我们的交互式机器人小车主要可以分为EVK1105核心控制模块、Wi-Fi无线网络模块、传感器信号采集模块、视频语音采集模块、L298N电机驱动模块、太阳能充电模块和车体模型七大模块。具体系统硬件结构框图如下所示:

图(1):交互式小车系统结构框图
其中Wi-Fi网络模块我们暂时考虑用无线路由器再结合EVK1105上的网络服务模块来构建,暂不详述。下面将着重介绍传感器信号采集模块、视频语音采集模块、L298N电机驱动模块(包含舵机控制)、太阳能充电模块的基本原理:
3.1.1、传感器信号采集模块
在这一模块中我们主要用到了ADXL345三轴加速度传感器、避障用的红外光电传感器(经试验这样避障会产生较大盲区,如算法优化不成功我们可能会以超声波测距模块替换)、霍尔元件、震动传感器、光传感器。在这一模块中除装备了必要的传感器外,我们还将为它留下充足的传感器拓展口,以方便以后进行功能的拓展和一些性能方面的改进。
其中ADXL345是一款高精度数字式的三轴加速度传感器,它具有在16G下高分辨率(13Bit)测量能力,同时支持SPI和I2C通信方式。有了它便可有效的检测出小车的运动路径,还确保了机器人小车行驶过程中的平稳。具体模型如下:

设机器人的初始位置为( X 0,Y 0 ),对x 轴的初始偏角为α0 ,经过单位时间t 后机器人的位置 (Xt,Yt)为:
X=2Rsin(R/2)cos(α0 +β/2)+X0
Y=2Rsin(R/2)sin(α0 +β/2)+Y0
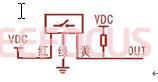
光电传感器用于对障碍的检测,它的有效检测距离可达30cm且不受光线强弱影响,具体连接如图(2)所示。小车的速度检测我们是通过霍尔元件来实现的,具体原理是在车轮加上强磁体,然后让MCU根据霍尔元件传会的脉冲定时,再结合车轮直径便可算出车速。震动传感器则用于检测车体是否发生碰撞。光传感器主要是为太阳能自动充电服务的,有点类似于一般的智能车自动寻找点亮的蜡烛并将其熄灭的过程。而我们的光传感器传回的主要是模拟信号,因此要先对其进行AD
交互式机器人小车 AT32UC3A0512 Wi-Fi模块 EVK1105 ADXL345 相关文章:
- 大热的餐桌点菜系统设计,拿来就用的解决方案(06-03)
- 基于手机远程遥控和物联网技术的智能家居控制系统,详细的软硬件架构(原理图、流程图、详细参数)(06-20)
- 农业温室大棚监控系统的整体设计方案(包括软硬件实现)(04-18)
- 轻松打造智能家庭卫士系统(原理,软硬件实现,器件选型)(04-11)
- DIY实现智能家居:智能家电语音控制系统的完整设计方案(05-14)
- 一种基于微加速度计的无线教鞭系统设计(07-22)