大热的虹膜识别系统的硬件设计与实现,系统方案、软件流程、算法设计
率=640*480;
256灰度级图视频采样速度=15帧/秒。
3 系统方案
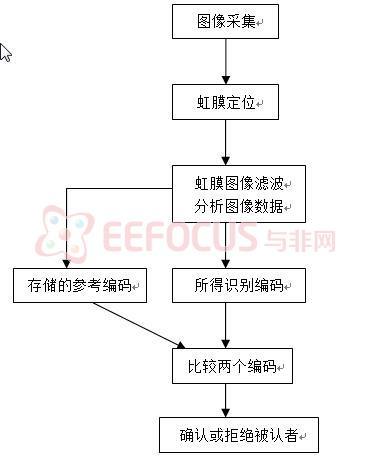
虹膜识别系统由图像采集,图像预处理,虹膜特征提取和编码,模式匹配四个部分组成。虹膜图像的图像预处理包括虹膜定位、归一化、图像增强等步骤。系统模块如图。
虹膜图像采集系统:我们希望研究在不同光照下采集虹膜图像质量。经验证明人类虹膜的直径约为1cm,为了获得有足够信息量的虹膜图像通常要求由特制的摄像器材组成的采集系统,拍摄距离一般不超过十几厘米。适度的照明对于虹膜图像采集也是非常重要的,太强的照明会令人眼感到不适,光照太弱则图像缺乏必要的灰度对比,增大量化误差。两外,在图像采集的过程中照明光源常常会在虹膜上留下较明显的光斑,形成了噪声污染。这里的关键问题是:研究一个敏感最优的光源使光斑的尺寸精良小、虹膜特征尽量清晰,噪声污染的位置保持一致,减少图像畸变。
虹膜定位和归一化算法:采集的图像包括大量的非虹膜区,如部分人脸、眼巩膜、眼睫毛等。这些区域的信息不被虹膜识别所利用,进行虹膜定位通过确定虹膜的内外边界去除这些无用的信息。图像采集时不同的两次拍摄人眼到镜头的距离不可能保持完全一致,造成虹膜图像有一定的尺寸差异。如果当拍摄时人的头部的倾斜,也会造成图像有一定角度的旋转。进行图像校正可以避免上述情况带来的误差。这里的关键问题有两个:快速精确地从包含大量非虹膜部分的图像中定位虹膜,并对其边界或数学模型进行描述;利用几何变换抵消拍摄时的虹膜图像变形的干扰。
特征提取和编码算法:由于虹膜的结构组织较复杂(分四层),其中的纤维细胞、结缔组织、毛细血管和色素等都会对虹膜的纹理产生较大的影响,因此虹膜的纹理结构极为复杂,不像指纹识别一样能提供清晰的特征点(指纹的交叉点和端点)或特征线。所以目前对虹膜的纹理特征认识尚未达到统一,各个研究机构所采用的虹膜纹理特征常有较大的区别,编码方式也有很大不同。希望寻找有较清晰物理意义的虹膜纹理特征,研究一种新的虹膜特征提取和编码算法,将一幅数据量较大的虹膜图像利用一个数据量较小的特征矢量来描述,并通过大量的实验数据来证明特征选取的合理性,和算法的有效性、准确性。这里的关键问题有两个:有数学模型来描述虹膜的纹理结构,根据该模型的特点寻找可区分虹膜的一半特征;构造相应的函数或滤波器对此特征进行提取,并寻找快速的特征矢量编码方法。
比较和判决算法:由于虹膜纹理的复杂性,目前各种特征提取和编码的多样性,现有的比较和判决算法也是各不相同。将根据上一步得到的特征矢量本身物理意义研究新的比较和判决算法。这里的关键问题是:寻找虹膜特征矢量的快速匹配方法,并利用模式识别、信号检测的相关技术减小判决误差。
- 系统算法设计
4.1 边缘定位
虹膜的定位问题即是图像的边缘检测问题。边缘是图像的基本特征且保留了原始图像中相当重要的部分信息,而又使得总的数据量减少了很多。准确提取边缘既能减少图像处理的信息量,又可重点描述物体的形态特征,为进一步的处理奠定基础。
经典的边缘提取方法是考察图像的每个像素在某个邻域内灰度的变化,利用边缘邻近一阶或二阶方向导数的变化规律。这种方法称为边缘检测局部算子法。
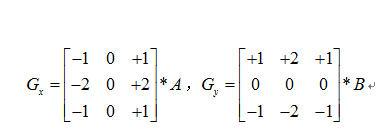
索贝尔算子(Sobel operator)是图像处理中的算子之一,主要用作边缘检测。在技术上,它是一离散性差分算子,用来运算图像亮度函数的梯度之近似值。在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量。Sobel算子是在Prewitt算子的基础上,对4一领域采用加权的方法计算差分,它由下式给出:

由于Sobel算子是滤波算子的形式,用于提取边缘,可以利用快速卷积函数, 简单有效,因此应用广泛。美中不足的是,Sobel算子并没有将图像的主体与背景严格地区分开来,换言之就是Sobel算子没有基于图像灰度进行处理,由于Sobel算子没有严格地模拟人的视觉生理特征,所以提取的图像轮廓有时并不能令人满意。 在观测一幅图像的时候,我们往往首先注意的是图像与背景不同的部分,正是这个部分将主体突出显示,基于该理论,我们给出了下面阈值化轮廓提取算法,该算法已在数学上证明当像素点满足正态分布时所求解是最优的。
核心公式:该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像,其公式如下:
图像的每一个像素的横向及纵向梯度近似值可用以下的公式结合,来计算梯度的大小。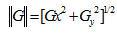 然后可用以下公式计算梯度方向。
然后可用以下公式计算梯度方向。 在以上例子中,如果以上的角度Θ等于零,即代表图像该处拥有纵向边缘,左方较右方暗。
在以上例子中,如果以上的角度Θ等于零,即代表图像该处拥有纵向边缘,左方较右方暗。
虹膜识别 图像采集 图像预处理 虹膜特征提取 Spartan3E 相关文章:
- 基于FPGA的混沌加密虹膜识别系统设计(06-04)
- 基于TMS320DM6437的虹膜采集和识别系统设计(10-22)
- 一种基于软件关机电路的电源系统设计方案(07-04)
- 基于DSP的机器人视觉伺服系统研究(04-17)
- CPLD在DSP多分辨率图像采集系统中的应用(03-27)
- 基于TMS320F206 DSP的图像采集卡设计(06-26)