动量轮模拟器的设计
引言
在卫星姿态和轨道控制计算机(AOCC)分系统的设计和室内联调阶段,为方便系统调试,需设计动量轮模拟器,模拟执行机构动量轮所决定的卫星姿态和控制效果,代替真实部件进行分系统的开环和闭环试验。
动量轮模拟器的系统结构和功能
本模拟器的核心处理芯片采用TI的TMS320VC33(以下简称VC33),该芯片是一款高性能、高性价比的32位浮点DSP|0">DSP处理器。系统结构如图1所示。

动量轮模拟器是卫星控制系统地面测试设备的一部分,主要完成对来自AOCC的控制指令和控制电压的识别,然后按照控制指令和控制电压模拟动量轮的转动情况,向卫星和地检设备输出转速脉冲、工作状态、转动状态和电枢电流模拟信号。
动量轮模拟器具有开关量输入/输出接口和模拟量输入/输出接口,并配有触摸显示液晶屏,用于设备自检或运行时,控制和显示动量轮模拟器的开关信号状态和角速度。此外,在触摸显示液晶屏上可以选择模拟两种不同转动惯量的动量轮。
动量轮模拟器的硬件设计
DSP的选型:本系统模拟某卫星4个动量轮的运行,主要工作为:采集4路彼此独立的差分控制电压,按轮角速度公式ω=ω+Ut×K×t/J(ω为动量轮角速度,Ut为动量轮输入控制电压,t为动量轮运算周期,K为比例常数,J为动量轮转动惯量)计算后,以24个脉冲/转输出转速频率,并调理成地检设备要求的幅值。这里的计算需要选择高速且支持浮点运算的处理器。
VC33是32位浮点处理器,其功能结构与C31相似,但由于在时钟、电源、存储区设计上做了优化,其工作速度更快(每条指令执行只需13ns)、功耗更小,并集成了较大的片内存储区。另外,VC33价格较低(约120元,比TI公司的6X系列的同性能浮点DSP低很多)。VC33配以CPLD EPM7128,做以逻辑控制方案的综合指标较为理想。
动量轮控制电压的采集:14位ADC芯片MAX125拥有A、B两组信号输入端,每组4个输入通道,内置4路同步采样保持器。在实际应用中分别采集来自主、备AOCC的各4路控制电压,将其经过阻抗匹配后,连接到MAX125的输入端,转换结果送给DSP处理。CPLD提供ADC的控制信号,在逻辑内部实现对ADC启动信号、转换通道的选择。
电枢电流输出:上述DSP计算结果并行传送给逻辑芯片EPM7128,DSP通过逻辑芯片实现对DAC7615的片选、时钟、数据和启动转换的控制;DAC7615是12位串行数字量输入,4路单端电压输出的DAC,D/A转换速率为76ksps×4通道,转换精度为±0.1%FSR。本设计中,将其配置为单极性0~2.5V输出,再经运算放大器做阻抗匹配后,形成0~4V的电枢电流信号输出到地面测试系统。
对于AOCC的控制指令,经相应电平转换电路后,连接到CPLD识别,然后送给DSP处理。对于转动状态和电源状态,则根据DSP计算结果输出;外扩串口控制芯片16C2552,与触摸显示液晶屏进行通信,将轮转速及状态进行显示。VC33的浮点运算能力为120MIPS,完全满足转速脉冲的计算要求。两种动量轮的选择开关设计在触摸显示液晶屏上,通过串口将不同的轮转动惯量特征送给DSP处理。
所有数字输入信号均为比较器接入,所有数字输出信号都为三极管驱动输出,控制指令为0/12V数字信号,转速脉冲为0/12V数字信号,电源状态和转速方向为0和开路两种状态数字信号。
动量轮模拟器软件结构
动量轮模拟器软件主要是指DSP的应用程序,图2为其软件主程序流程图。
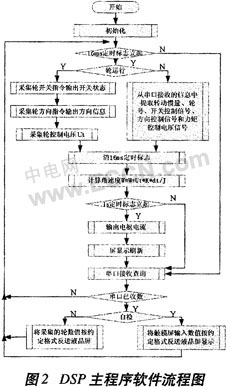
DSP主程序完成控制信号的采集、角速度运算和各种特征指示量的输出,以及与液晶屏的通信。并判断系统是工作在自检状态还是模拟轮运转状态,依情况控制,系统采集数据或提取触摸屏键入的数据,以便做角速度和角度的计算。
电枢电流和液晶屏的显示数据1s刷新一次。轮的转动角度是角速度对时间的积分,在1μs定时中断服务程序中完成,如图3所示。转速频率以24个脉冲/转输出时,每个脉冲代表360/24=15°,占空比为50%,每隔7.5°角频率端口翻转一次。

动量轮模拟器的运行效果
动量轮模拟器作为卫星控制系统地面测试设备的组成部分,完成了预期的功能:在地面测试设备移动后,对地面测试设备进行全面快速自检,确保其与卫星对接时不会损坏卫星电路,以便正确测试卫星数据;模拟动量轮部件,经采集和运算后输出按照控制力矩的大小和方向变化的转速脉冲。
本模拟器成功模拟了动量轮部件,已通过了用户验收,并应用在了某型号卫星的AOCC分系统和整星试验的测试项目中。
结语
以高性能浮点DSP芯片TMS320VC33为核心,以CPLD为辅助设计的动量轮模拟器,具有多种端口,硬件简单,只占用了一块APCI板卡的面积。该系统对浮点运算能力要求高的领域具有很好的参考价值。
- 基于TS201的多DSP系统设计与实现(04-17)
- 基于DSP、DDS和ARM雷达中频信号模拟器研究(05-18)
- ARM体系结构之:ARM开发调试方法(08-13)
- 一种基于FPGA的雷达回波实时模拟器的实现(06-05)
- 基于CAN总线的飞行模拟器通信接口设计(12-21)
- 应用调试-----输入模拟器之编写测试模拟功能(11-21)