基于FPGA的活套高度和张力系统解耦控制器设计
时间:06-06
来源:互联网
点击:
将式(17)离散化,实际的活套臂长度为796mm,在线性工作点处对应的套高285 mm,对活套高度附加15%左右,即幅度为40mm的阶跃扰动信号.神经网络的结构4-6-3,加权系数初始值取区间[-0.5,0.5]上的随机数,输入模式选为r(k),y(k),e(k),1.学习速率η=0.34,惯性系数α=0.06.解耦后的带钢张力变化曲线如图3所示. 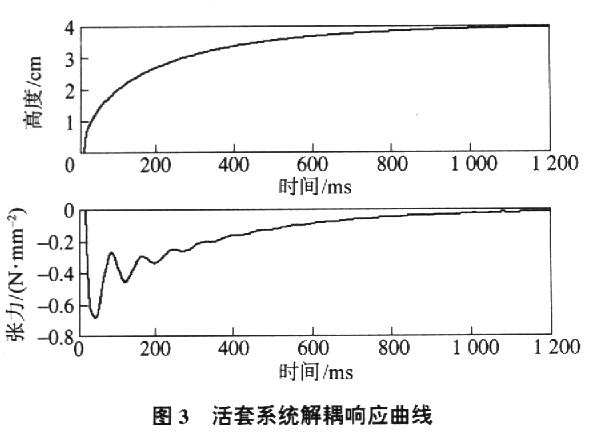
仿真结果表明,基于上述的控制策略,系统在满足活套高度增量设定的同时,活套张力波动较小,在500ms时张应力的变化为-0.2N·mm-2在800ms时张应力的变化为-0.05N·mm-2,从而实现了活套高度与张力耦合系统的解耦控制.
3 结语
如何将神经网络的控制算法固化到专用的芯片上,以解决高速轧制过程与复杂控制算法计算耗时的矛盾,是实际热轧现场能够应用的前提.基于上述分析,本文设计了相关的仿真软件,并用FPGA实现了一个采用BP算法能够进行片上学习的前馈多层网络模型.
活套系统 解耦控制 数据精度 脉动阵列 FGPA 相关文章:
- FAE讲堂:利用赛灵思FGPA实现降采样FIR滤波器(05-06)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)