微弱信号检测原理在光尾流探测中的应用
尾流是舰船运动时产生的一段含大量气泡的湍流区域,存在着尺寸为几十微米到几厘米之间的气泡。由于这些气泡的存在,使海水介质的特性发生了明显变化,为尾流自导的探测和导引提供了基础。在探测过程中,通过对激光束透过气泡幕的前向散射信号进行采集及分析,得出以下结论:随着尾流中存在气泡的大小、密度的变化,光透过尾流后的散射信号的强度及光谱都将产生相应变化,然而激光探测的灵敏度很高,海洋环境复杂,存在如红外辐射、热噪声等的影响,使有用信息深埋在各种干扰噪声中。因此,如何设计低噪声信息处理系统从而有效提取微弱有用信息已成为尾流气泡探测的关键问题。为此,设计了光尾流检测系统,重点研究前置放大问题以及微弱信号检测问题,并进行仿真验证,效果良好。
1 光尾流检测处理电路的设计
光尾流检测主要测试激光通过气泡散射到达接收系统的强度变化情况。这个过程需要经过信号采集、光电转换、放大、滤波等过程,系统通过硬件设计进行信号的放大及降噪处理,提高系统的抗干扰能力,并采用数字锁定放大技术对信号进行检测,提高了系统的检测能力。
光尾流检测处理电路原理框图如图1所示。

在微弱电流检测中,前置放大电路是信号处理的第一级,该电路完成I/V变换,同时进行小信号放大,在这一级混入噪声,将会降低系统的检测性能,因此前置放大尤为重要。本系统的输入信号为固定频率的交流信号,带宽较窄,理想情况下,放大器在该频段内应有良好的线性,即放大器对各种幅度的信号放大倍数应恒定,否则会造成谱线畸变。然而在实际应用过程中,放大器的增益会受到电源电压不稳定、元件老化以及温度变化的影响,导致其线性度下降。因此该系统采用负反馈措施,将各种不稳定因素减小到最低程度,提高前置放大器的线性度。选择FET型低噪声运放芯片OPA124作为前置放大器,他具有低偏置电流、低失调电压等特性,能很好地解决微弱信号放大问题。图2为I/V变换电路原理图。

2 光尾流信号检测原理
在工程应用中,微弱信号检测方法是将信号经过前置放大,再利用锁定放大器将其提取出来。锁定放大器的基本结构包括信号通道、参考通道、相敏检测器(PSD)和滤波器等。根据不同的用途可分类为:正交矢量型锁定放大器、外差式锁定放大器等。光尾流检测利用正交矢量锁定放大器进行检测,利用两个正交的分量计算出幅度和相位,在本系统考虑幅度的变化,暂不考虑相位的变化。其原理图如图3所示。
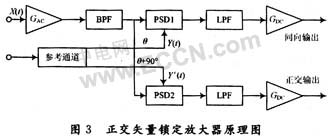
传统的锁定放大方法是利用模拟器件实现,这种方法速度快,然而价格昂贵、体积较大、应用不灵活,因此不适合于光尾流检测系统户外试验的要求。数字锁定放大器通过软件和硬件的结合进行处理,可用来测试各种不同的微弱信号,操作性强、灵活、方便。
正交矢量锁定放大器原理如下所示:
假设被测信号为X(t)由有用信号S(t)和噪声N(t)组成,Y(t)与Y′(t)为参考信号。有用信号及参考信号为正弦函数,频率为f,对上述信号作采样,采样频率为fs,得到数字信号:X(m),S(m),N(m),Y(m),Y′(m),则有:

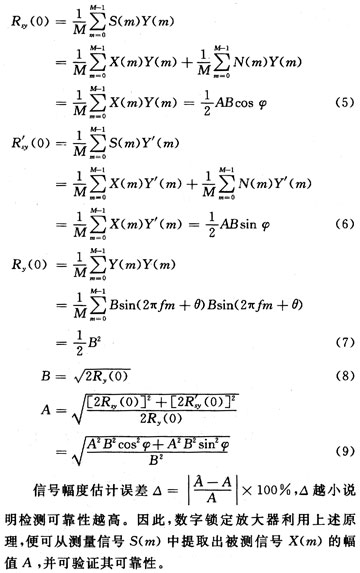
其中n为延迟时间,当X(m)=Y(m)时,Rxx(n)为X(m)的自相关函数。取信号延时为0,则被测信号与参考信号Y(m),Y′(m)的互相关函数以及参考信号Y(m)的自相关函数分别为:
3 仿真分析
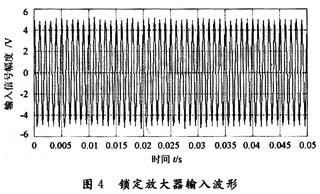
仿真的测量信号形式如式(1),参考信号形式如式(2),式(3),假设进入尾流的干扰为高斯白噪声,均值为0,方差为δ2,信号频率1 kHz,采样频率10 kHz,积分时间100 ms,即快拍数M=105,仿真结果如图4~图8所示。
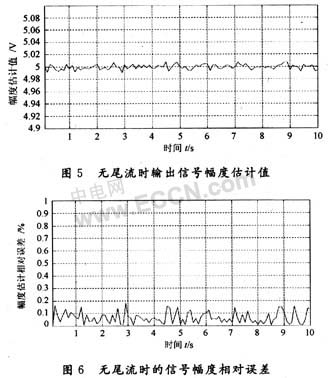
当无尾流时,假设输入信号幅度为5 V,图4为截取50 ms时的信号波形。输出信号幅度估计如图5所示。
估算出输出信号的幅度估计均值为5.001 V,其幅度估计误差如图6所示,其最大相对误差△=0.18%,因此在无尾流时,利用数字锁定放大器进行输出信号的检测估计是有效的。
假设当检测系统进入尾流,根据尾流的强度不同,输出信号将产生不同程度的衰减,同时也将不可避免地混入噪声,图6仿真系统通过不同强度尾流,所得到的输出信号幅度估计值,图7为三种情况下,信号幅度估计误差。
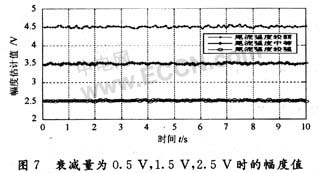
图中?表示仿真尾流强度较弱情况,信号衰减量为0.5 V;*表示仿真尾流强度中等情况,信号衰减量为1.5 V;○表示仿真尾流强度较强情况,信号衰减量为2.5 V。
由仿真结果可以看出,尾流强度较弱时,信号衰减量较小,其输出信号幅度估计均值为4.502 6 V,最大相对误差△=1.17%;尾流强度中等时,输出信号幅度估计均值为3.503 3 V,最大相对误差△=1.13%;尾流强度较强时,输出信号幅度估计
- 基于速度匹配软件的网络芯片仿真方法(11-06)
- 使用NI PXI和LabVIEW实时模块有效简化硬件在环仿真系统(06-14)
- PCI总线智能GJB289A仿真卡设计(01-06)
- 导入灵活的FPGA验证方法(06-21)
- 测试SDRAM控制器的PDMA(01-04)
- 安捷伦展示3D-EM软件版本整合电路设计流程(05-27)