基于CP-132UL V2的IMU地面测试软件设计
时间:08-03
来源:互联网
点击:
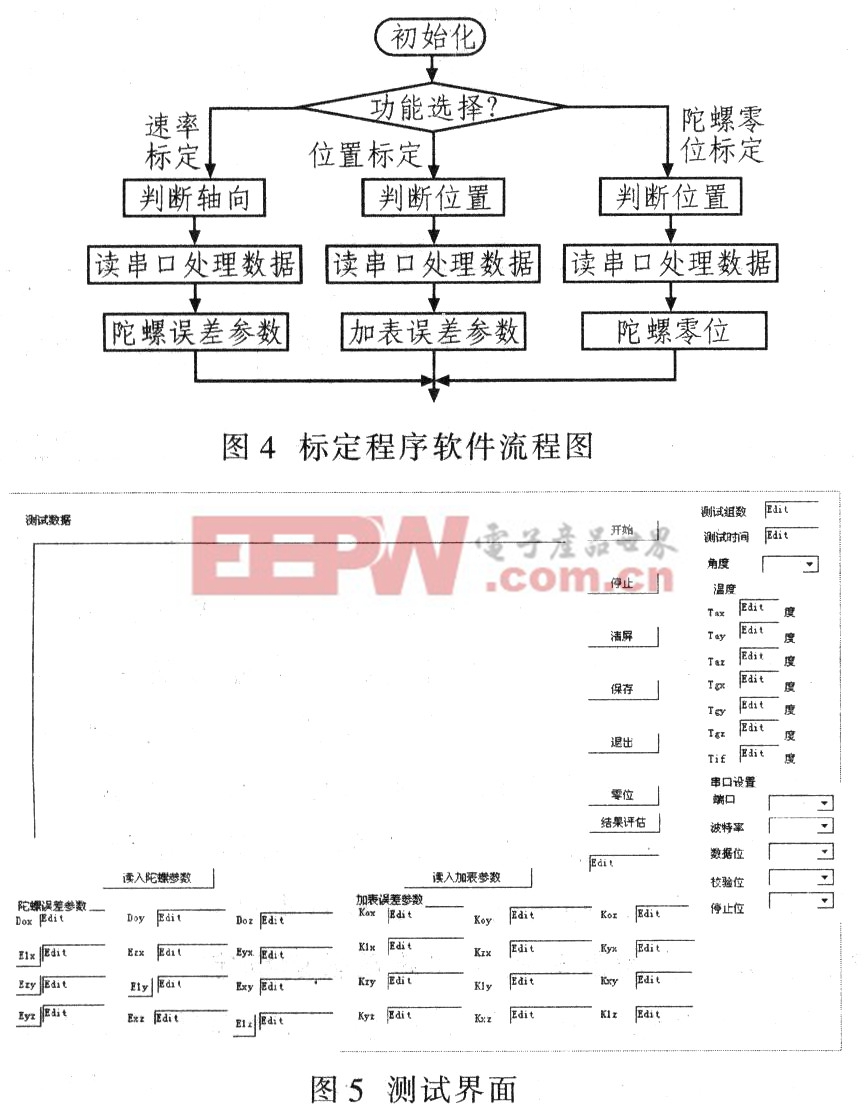
5 结果评估
将IMU组合置于平板上,利用所测得的陀螺和加表的各项误差系数,根据陀螺和加表的误差方程,求得此时陀螺和加表在标得的误差系数下的输入,即陀螺各轴敏感的地球自转角速度和加表各轴敏感的重力加速度,然后与理想的地球自转角速度及重力加速度相比较,评估标定结果。如果相差在陀螺和加表的精度允许范围内,说明标定结果比较满意。
6 结语
CP一132UL V2一端接IMU组合,另一端直接插入工控机,采用VC6.0编写满足测试方案的测试软件。经工程测试证明,测试软件与CP一132UL V2兼容性好,在高波特率下工作稳定,顺利完成IMU的地面测试。
- 简易低成本信号采集系统的制作及编程方案(10-15)
- SIMULINK示波器参数设置(01-05)
- simulink示波器参数设定实现输入脉冲频率可调输入显示(01-04)
- C++test在对Tornado 2.2-VxWorks-5.5 simulator 下针对C++代码单元测试(10-22)
- ADISl6209 IMU在倾角测量中的应用(09-14)
- C++test在对Tornado 2.2-VxWorks-5.5 simulator 下(06-20)