一种新型智能清洁机器人测控系统的设计与实现
中断,避免发射波不经反射就直接被接收器接收而引起假中断。
2.3.2 红外反射式传感器检测模块
该模块用于主动探测机器人周边障碍物和地面落差。选用JY043W型红外反射式传感器,该型传感器调理电路简单,安装调试方便,每一路的检测距离可以达到 7cm,满足本文设计的需要。该部分由6路检测单元组成,其中在机器人左前方和右前方各安装2路,配合超声波传感器实现周边障碍物的检测。另2路分别安装在机器人前端左下方和右下方,探头距离地面4cm,用于检测地面是否有台阶等落差,防止机器人跌落。红外反射式传感器具体工作过程为,发现障碍物时,发射管发出红外信号遇到障碍物反射回来,接收管接收到反射信号后导通,则信号处理电路的输出端变为低电平,该低电平直接送入控制器P2的一个端口,当控制器检测到这个端口的低电平变化时则表明该方位发现障碍物。
2.3.3 接触传感器检刚模块
接触传感器具有检测范围大、信号无需调理、占用控制器资源少等一系列优点。本文选择小型接触开关作为接触传感器,安装在机器人前端的缓冲器上,作用在于通过轻微的碰撞接触,检测那些未能被超声波传感器和红外反射式传感器检测到杆状或微小障碍物,如座椅腿等。
3 测控系统软件设计
3.1 传感器信息处理
当各路传感器检测到障碍物时,控制器必须获得障碍物的准确信息后,才能发出正确的避障指令。为了获得有效信息,程序代码中为每一路检测信息都设定一个标志位,主程序不断检测各个标志位的值的有效性,以此作为障碍物方位信息。对于不同的传感器,其信息判断标志位有效值也可能不同。在本文所提到的3种传感器中,超声波传感器的信号处理程序最为复杂,其流程如图3所示。

图3 超声波传感器信号处理程序流程
3.2 驱动控制
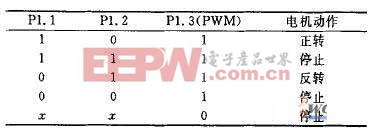
驱动控制模块是智能清洁机器人自主行为的执行机构。根据传感器信息判断当前环境状态,对不同的障碍物信息,控制器将调用不同的避障策略,策略与驱动控制的动作组合指令相对应,通过左右驱动电机动作的有效协作,实现机器人前进、后退、转弯等自主动作。单部电机的控制信号与电机动作之间的关系如表1所示,其中 P1.1和P1.2为电机方向控制信号端口,P1.3为PWM波调速端口,需要减速时只需要降低PWM波的占空比即可,理论上可以实现256级调速。
表1 控制信号与电机动作关系
3.3 避障算法描述
根据模糊控制思想并结合实际行走试验设计避障算法。以传感器系统9路传感器的检测距离和障碍物所在的方位为模糊控制输入量,以驱动轮的前进、旋转和后退动作为模糊控制输出量。超声波传感器检测最小距离设定为15cm,距离远;红外传感器检测距离为7cm,距离适中;接触传感器是在发生碰撞后才能检测到障碍物,因此检测距离最近。据此设距离信号(记作:D)的模糊语言集合为:
D={近,中,远}
设定其相应的语言变量,记作:
ND=近,MD=中,LD=远
以各路传感器在机器人上的安装位置作为障碍物所在方位(记作:A)。超声波传感器安装在正前方,在其左右两边依次是接触传感器、下方红外传感器和周边红外传感器。则设方位信号的模糊语言集合为:
A={最左,较左,左,左下,中,右下,右,较右,最右}
设定其相应的语言变量,记作:
BL=最左,ML=较左,L=左,LD=左下,M=中,R=右,RD=右下,MR=较右,BR=最右
设机器人驱动轮的动作集合为:
{右转,稍微右转,后退,减速,前进,稍微左转,左转}
设定其相应的语言变量,记作:
TR=右转,TRL=稍微右转,GB=后退,SD=减速,GA=前进,TLL=稍微左转,TL=左转
对于清洁机器人来说,在避障的同时,还要能够对清洁区域进行遍历。在保证避障和遍历的前提下,为了减少控制器的计算量并避免程序复杂化,本文采用逐一查询方式获得模糊控制量之一障碍物方位,根据障碍物方位即可获得另一输入量即机器人与障碍物间的距离。容易理解,采用逐一查询方法意味着控制器获得的障碍物信息来自于最先被传感器系统检测到的障碍物,而且控制器将根据最先获得的障碍物信息来调用相应的避障策略。因此,当有2个或2个以上方位有障碍物时,执行避障策略时机器人有可能与障碍物发生碰撞。试验发现,只有当左边的最左、较左方位和右边的最右、较右方位都有一个或2个发现障碍物时,才有可能导致机器人与障碍物发生碰撞。为了避免这种情况发生,将机器人左右两边都发现障碍物的情况也作为一个障碍物方位变量,不论机器人左右2边是同时发现一个还是2个障碍物,都仅设其模糊语言为左右,设定相应的语言变量为LR。根据有利于避碰的原则,将障碍物方位信息的查询顺序确定为:
LD,RD,LR,M,
- 一种新型智能清洁机器人测控系统的设计(06-25)
- 用于机器人的RIO嵌入式控制平台(03-25)
- 基于LabVIEW和PXI平台的6-DOF并联机器人控制系统的开发(04-19)
- 利用LabVIEW设计用于研究飞虫的机器人设备(03-21)
- 激光检测在汽车制造过程中的应用(05-12)
- 基于LabVIEW和CompactRIO设计飞虫机器人的研究(01-21)