基于面阵CCD的运动物体瞬时位置的检测
引 言
CCD(Charge Coupled Devices,电荷耦合器件)是20世纪70年代初发展起来的新型半导体集成光电器件。由于CCD器件具有诸多优点,使得近30年来,CCD器件及其应用技术的研究取得了惊人的进展。目前国内利用CCD进行工业实时在线检测的系统大多用线阵CCD,精度不高、结构复杂、重量重、体积大、建造成本高、整体结构松散、数据量增大处理运算麻烦等,而面阵CCD光敏呈二维排列,可以将二维平面图像直接转换为一维光电信号输出,为提高采样精度和简化结构提供了条件。随着计算机技术的飞速发展以及动态图像处理理论的深入研究,采用面阵CCD图像传感器对运动目标进行监测成为测量领域的一种新的趋势,尤其在航天通信系统中,跟踪与数据的获取是为星座相对运动之间提供数据信息、连续跟踪与轨道精确测控服务的。
通过星座仿真可以得出,星座的相对运动的特点,应用面阵CCD来完成星座的相对运动的跟踪是一种新的跟踪方法,它使硬件变得简单,大部分数据处理都由软件来实现,使得跟踪达到速度与精度的完美结合。本文旨在用2个气浮台来模拟星座的相对运动。以目标气浮台上的光学反射球作为跟踪目标,位于追踪气浮台上的面阵CCD用来实时测得包含运动目标的图像信息传送到计算机;再由计算机进行处理得到运动目标位置信息、相对距离和方位;把测得的数据由串口输出给控制单元,进行精确的测量从而实现检测跟踪的目的,模拟跟踪如图1所示。

2 系统工作原理
(1)系统组成框图
本系统中主要由采集部分、处理部分、显示部分和控制部分组成,系统组成的框图如图2所示。
(2)面阵CCD传感器工作原理
面阵CCD由成像区(光敏区)、暂存区和水平读出寄存器3部分构成。当工作时,图像经物镜成像到光敏区,光敏区上电极加有适当的偏压时,光生电荷被收集到势阱里,这样就将光学图像变成了电信号。当光积分周期结束时,所有收集到的信号电荷迅速转移到暂存区中,然后经由水平读出寄存器,经输出级逐行输出1帧信息。在第一帧读出的同时,第二帧信息通过光积分又收集到势阱中,这样可以一帧一帧连续读出。
本文采用北京微视公司MVC1000M系列具有130万像素的面阵CCD传感器,如图3所示的实物图。

3 图像处理单元
(1)图像的预处理
为提高图像处理速度采用一种快速中值滤波的算法,设n×n个像素方形滤波窗口为:

(2)特征提取及位置的确定
为了进一步对图像做分析和识别,就必须通过对图像中的物体(目标)做定性或定量分析来得出正确的结论。在本系统中,由于目标是处于运动中,所采集到的目标图像会有不同程度的改变,另外,在目标跟踪系统中,通常只需辨明目标的类型,并不需要了解有关运动目标图像中更多的细节。
因为要给出目标点的位置,所以每张图像上的物体最终只能用1个点来表示,这个点就是物体的中心点,在图形学上称为图形的几何中心。确定物体的几何中心,只需扫描整张图像,寻找颜色是白色点,记录它们的横坐标和纵坐标,并做累加,同时累加白色点的个数,最后把累加得到的横坐标的值除以白色点个数后,得到的值就是物体中心点的横坐标数值,纵坐标也是如此。其算法表示如下:

一般,这样得到物体的几何中心还是比较准确的,除非物体在运动过程中发生了非常大的形变。得到的质心是运动物体在图像中的像素坐标,转换成实际坐标从而达到对运动目标的实时监测。
4 软件设计
CCD采集获得的图像为8位位图格式,本文采用可视化编程软件VC++实现图像预览以及处理。处理后的数据经串口输出给控制部分。计算机的程序流程图如图4所示。
面阵CCD采集到的图像经处理提取后,得如图5所示其实时图像,并提取跟踪目标的坐标,图像每过100 ms数据处理1次,并与下位机进行通信进行控制。

在串口通信模块软件实现中使用API函数结合非阻塞通信、多线程等手段;在主线程中处理图像数据,在辅助线程中监视串口,有数据到达时依靠事件驱动,读人数据并向主线程报告,并且WaitCommEvent(),ReadFile(),WriteFile()都使用了非阻塞通信技术,依靠重叠(overlapped)读写操作,让串口读写操作在后台运行。这样做大大节省了时间,提高了系统的运行效率。
5 硬件设计
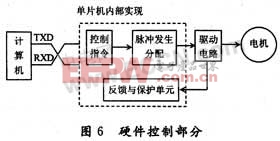
计算机通过RS 232的方式与单片机进行通信,将测得的位置信息传送给单片机,单片机收到数据后控制步进电机进行跟踪。其主要包括下位机与上位机的通信,以及步进电机的驱动电路的设计,硬件控制的框图如图6所示。
6 结语
本文通过面阵CCD对图像采集,结合计算机数字图像处理技术以及单片机,实现了对数据图像的扫描处理,从而获得了跟踪点的目标位置及对扫描的图像进行实时动态的
- 基于CCD技术的非接触在线检测仪设计(06-27)
- 一种舰船尾流探测系统设计(08-05)
- 3-D轮廓测量中相位解包裹应用(11-10)
- 射线检测中CMOS的研究(01-04)
- 基于CCD16点数学模型的全自动焦度计光学图像系统的设计(01-09)
- 滚珠螺母形位误差的CCD测量(03-23)