基于EPA的光栅位移测量系统
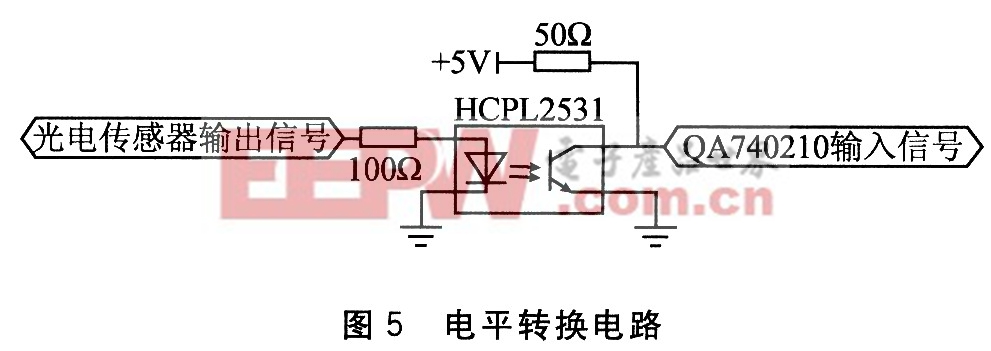
光栅信号A、B有以下关系: 3 光栅位移测量系统的总体设计 4 光栅位移测量系统的硬件设计 SGC-4.2型光栅传感器输出的是HTL方波信号,而QA740210的工作电压为+5 V,所以必须通过电平转换才能实现倍频脉冲的输出。电平转换电路如图5所示。 4.2 电源电路 4.3 人机接口和声光报警电路 4.4 工业以太网接口电路 5 提高测量分辨率及精度的措施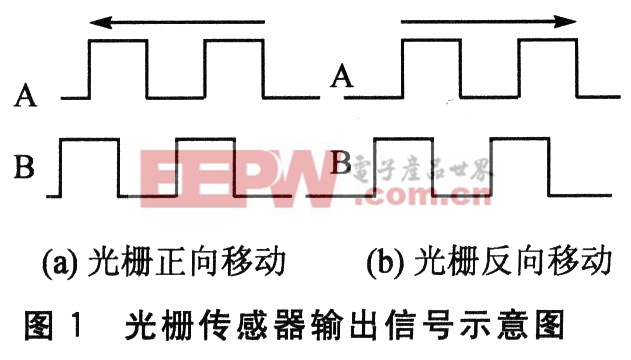
①当光栅正向移动时,光栅输出的A相信号的相位超前B相90°,则在一个周期内,两相信号共有4次相对变化:00-10-11-01-00。这样:每发生1次变化,可逆计数器便实现1次加计数,1个周期内共可实现4次加计数,从而实现正转状态的四倍频计数。
②当光栅反向移动时,光栅输出的A相信号的相位滞后于B相信号90°,则一个周期内两相信号也有4次相对变化:00-01-11-10-00。同理,如果每发生1次变化,可逆计数器便实现1次减计数,在1个周期内,共可实现4次减计数,就实现了反转状态的四倍频计数。
③当线路受到干扰或出现故障时,可能出现其他状态转换,此时计数器不进行计数操作。
综合上述分析,可以做出处理模块状态转换图,如图2所示。其中“+”、“-”分别表示计数器加/减1,“0”表示计数器不动作。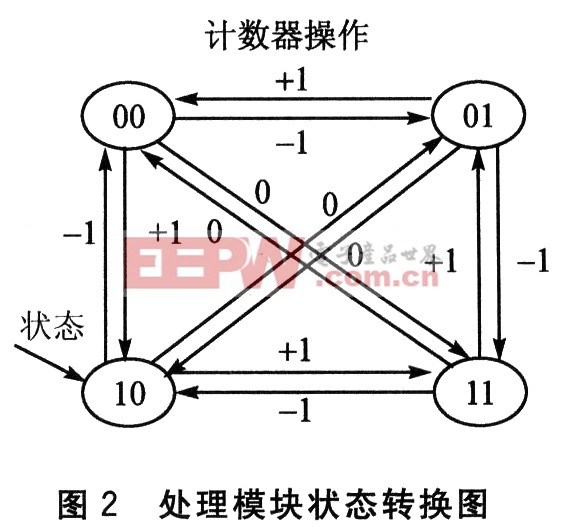
光栅位移测量系统的结构框图如图3所示。系统工作时,SGC-4.2光栅尺将位置信号先转化成HTL电压信号输出,经过调理电路滤波和整流后,处理成标准的方波信号。然后控制器DS80C410通过内部高速计数器对外部的方波信号进行计数运算。一方面向伺服驱动器发布电机动作指令,控制电机驱动位移执行机构运动;另一方面通过以太网收发芯片XT972ALC进行读写操作,将工业现场的测量信息上传到工业以太网络上,便于管理者进行全局决策。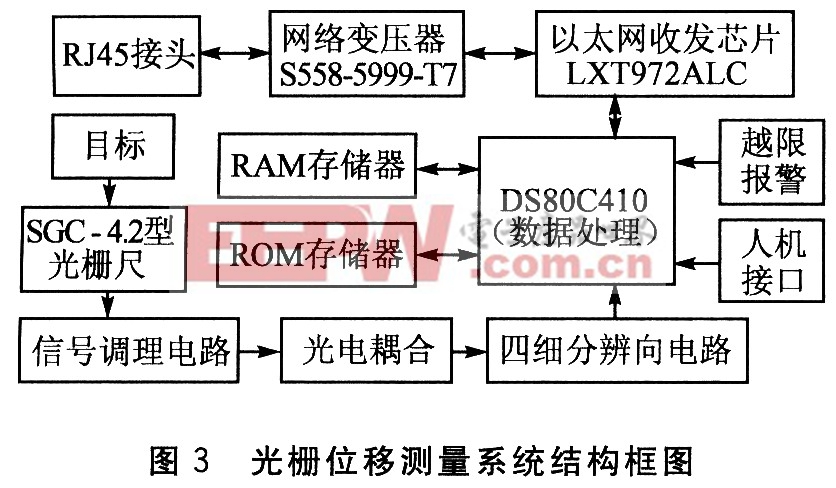
光栅位移测量系统的硬件实现主要包括位移检测电路、电源电路、人机接口和声光报警电路以及工业以太网接口电路的设计。
4.1 基于集成芯片的光栅位移检测电路
光栅信号检测电路可以由光敏三极管、比较器LM339、2片74193串联组成。但是这种设计方案往往需要增加较多的可编程计数器,电路元器件众多、结构复杂、功耗增加、稳定性下降。因此,本文对经过SGC-4.2型光栅尺(50线/mm)出来的脉冲信号进行倍频处理时,选择4倍频专用集成电路芯片QA740210来实现,对信号4细分后,可得分辨率为5μm的计数脉冲,这在工业测控中已达到了很高的精确度。QA740210集成电路可将两路正交的方波进行四倍频,并能根据输入信号的相位关系进行相位判别,产生2路加、减计数信号,可直接送到DS80C410高速计数器进行计数。
为了使QA740210正常工作,需要设计由X0、X1、X2构成的振荡器。振荡频率与电源电压无关,仅取决于充电和放电的总时间常数,即与R1和C1的值有关。本文选用R1=100 Ω,C1=10μF,所示振荡频率f=250 kHz。具体的实现电路如图4所示。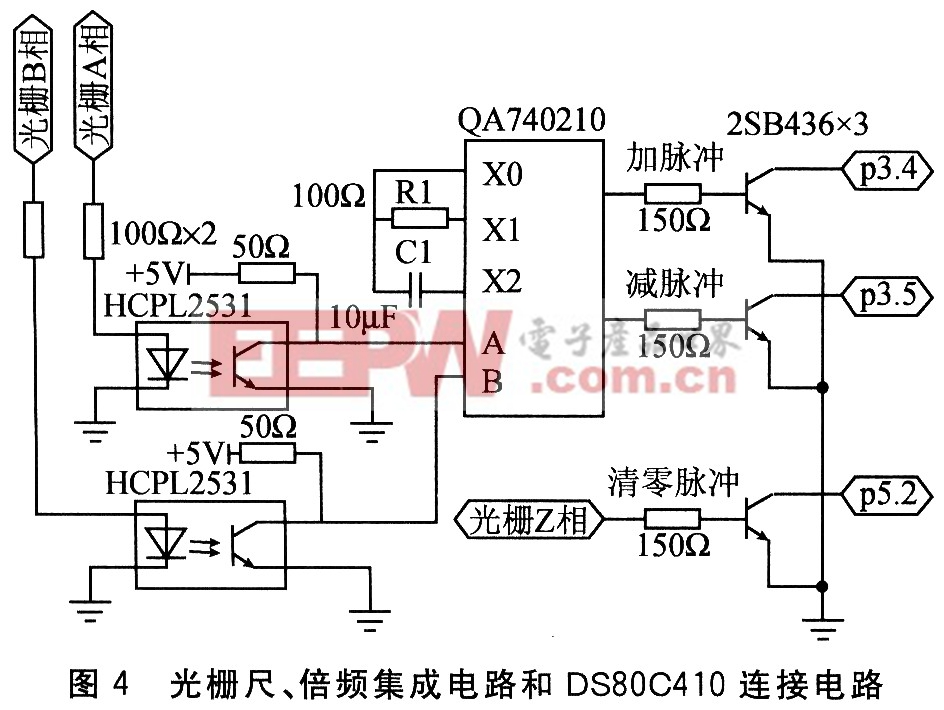
在进行整个控制系统设计时,如果电源系统过于复杂和冗余,不仅会对其他部分电路产生电磁干扰,而且经济效益也不好,所以设计中所有芯片都选择的是5 V、3.3 V或者1.8 V供电电压。这样,电源设计时只要用3片LM2596和一些电容、电感、二极管等就可以将24 V电压直接转化为所需电压,电路设计不仅容易,也非常经济,电源电路如图6所示。具体使用时可以根据需要选择LM2596-5V、LM2596-3.3V、LM2596-1.8V的芯片。要获得+1.8 V和+5 V时用图6(a)的接法,要获得+3.3 V时,用图6(b)的接法。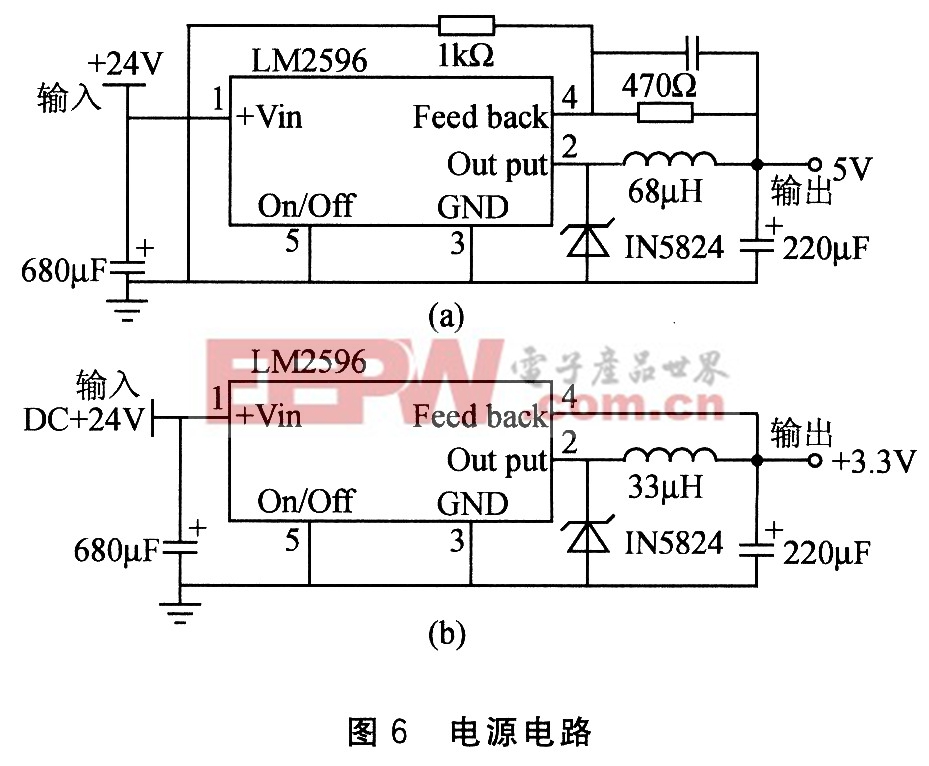
为限制位移执行机构在规定的范围内运动,必须用软件设置限位开关,每一边界有一限位开关。当撞到限位开关时,通过DS80C410从输出端口P5.2输出一个“1”电平,经电阻分压后,7920A的控制端MT得到约+1.5 V的电压,于是从其乐曲信号输出端OUT输出华尔兹乐曲信号,经过放大电路M51182L放大后,驱动扬声器发出相应的报警乐曲声,音量的大小可以通过调整10 kΩ电位器来实现。同时接通发光二极管,红灯报警,同时控制电机停止运转。具体电路如图7所示。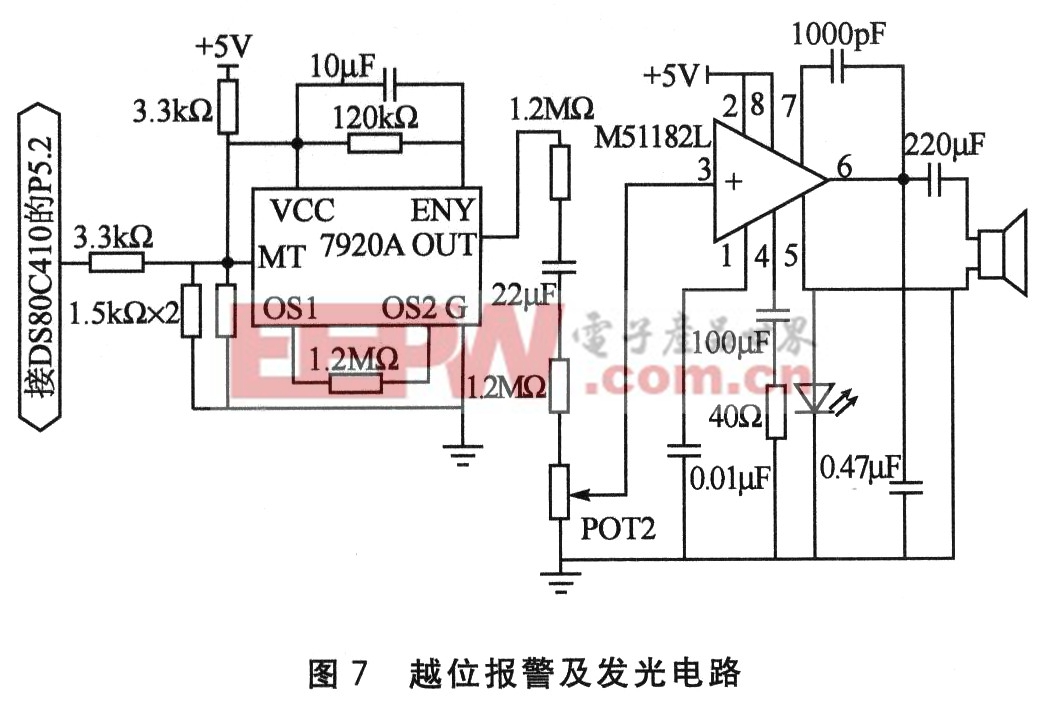
工业以太网接口电路是由微控制器DS80C410、以太网收发器LXT972ALC、网络隔离变压器S558-5999-T7、RJ45接头和双胶线等组成。以太网接口电路的作用,一方面是将工业现场的观测数据上传到以太网络上,便于相关的管理部门或个人进行决策管理;另一方面是将工业以太网的数据及操作命令传送到工业现场,管理现场的测量系统进行实时有效的工作。当只进行现场测量工作,而不需要进行以太网通信时,可以由微控制器DS80C410直接控制整个现场设备。所以测量系统既具有单系统现场测量的可操作性,又具有网络化测量的便捷性的优点。整个工业以太网接口电路略。
5.1 温度对测量精度的影响及补偿
由于热胀冷缩的作用,光栅刻线的间距会随温度而变化,这势必会影响测量的精度。在温度变化较大而对精度的要求又比较高的场合,必须对温度进行补偿。对于相同的材料和相同的结构形式,其温度引起形变的特性是相同的。补偿的步骤是设定环境温度在20℃时光栅的输出为没有温度误差的标准输出,在20℃附近选择一系列等间隔温度点,经过若干温度的正(反)行程,在这些温度点上测出栅尺的总体形变值,得出温度形变相关数据。利用这些数据进行特性曲线的拟合,拟合曲线即可进行对温度误差的修正。拟合的曲线的多项式选择二阶或三阶就足够了,形式为:
ε=a3t3+a2t2+azt+a0 (2)
式中ε为光栅尺的形变,t为温度,ai为待定系数。拟合方法采用最小二乘法,求得的拟合多项式即表示了温度与光栅形变的近似关系。进行补偿时有两种办法:一是将曲线的系数存于非易失性存储器中,修正时直接计算以上多项式;另一种是将以上曲线做成表格,补偿时,查表并插值。
5.2 提高系统抗干扰能力
光栅传感器在具有振动的环境下进行测量时,经常遇到干扰。在A相或B相的边缘处,即在电平跳变处,由于微小的振动,会在边缘处出现无数的小尖峰,使计数器误触发影响了计数精度。为此可以采用定时/计数器的飞读或利用对脉冲有效性判断等方法来提高系统的测量精度。
- 基于EPA的光栅位移测量系统原理及设计方案(10-19)
- 基于EPM7128的光栅位移测量仪设计 (03-19)
- 基于光纤光栅的油井压力/温度监测方案(03-21)
- 光纤光栅传感器在水布垭面板坝安全监测中的应用(01-11)
- 多目标质量指标优化设计(05-04)
- 涡轮流量计光栅尺位移传感器的注意事项(01-05)