星载MEMS原子钟稳频系统的优化及实验研究
1 引言
相干布居俘获CPT(Coherent Population Trapping)是原子与相干光相互作用所产生的一种量子干涉现象。利用高分辨CPT光谱研制出的被动型CPT原子频标具有体积小、功耗低、启动快等特点。CPT频标是原理上唯一能制成芯片级尺寸的原子频标,不仅在基础研究领域有重大意义,而且在深空探测、卫星导航、航天航空、数字通信、同步系统等对时间、频率要求严格的领域有着广泛的应用前景。20世纪90年代以来,激光冷却技术飞速发展,极大促进冷原子钟、光钟以及基于相干布居俘获的CPT原子钟的发展。这里介绍一种星载MEMS原子钟稳频系统的优化及实验研究。
2 CPT原子钟工作原理
用频率为ω1和ω2的两束激光和两超精细能级与激发态构成的A 三能级作用,当两束激光满足双光子共振条件时,原子布居数被捕获在基态的两个超精细能级上。不再吸收光子;当其中一束光的频率在原子共振频率附近扫描时,光在原子介质中的透射强度呈现为电磁诱导透明信号,电磁诱导透明信号经过处理后,可作为误差信号来锁定与调制驱动信号有关的本振信号,从而实现原子钟环路。得到高精度和高稳定度的频率标准,其评价指标为:短期稳定性和频率漂移。CPT效应是由激光与原子相互作用产生的,其窄小带宽对激光频率稳定性提出高要求。只有当激光频率稳定性满足要求,持续产生CPT效应,才能确保原子钟的计量精度。
3 稳频系统优化设计
频率稳定性通常指激光器在连续运转时.在一定的时间间隔内平均频率v与该时间内频率变化量 △v之比,即S=v/△v,很显然,变化量△v越小,则S越大,表示频率的稳定性越好。在工程上,有时也把S的倒数称为稳定度。频率稳定度又可分为短期稳定度和长期稳定度,前者指观测取样时间在1 s以内的频率变化,而大于1 s观测平均时间的就视为长期稳定度。频率复现性是表示激光器在不同时间、地点等条件下频率重复或再现的精度。
由此可见,频率的稳定性和复现性是两个不同的概念。因此,对一台稳频激光器,不仅要看其稳定度。而且还要看它的频率复现性如何。由于激光频率对环境温度的变化、机械振动等外界干扰极端敏感,即使采取严格措施,自由运转的激光器频率稳定性和复现性也不能达到量级。必须使用电子伺服系统自动控制激光器,当外界影响使激光频率偏离特定的参考频率时,可以通过鉴频信号,由电子伺服系统自动调节,将激光器的频率回复到特定的参考频率以达到稳频的目的。
3.1 调制器
该系统设计的伺服控制电路中,欲用10 kHz的正弦信号作为调制信号,故选用RC振荡电路。正弦波发生器产生信号分2路,1路用作调制信号,1路用作解调信号。采用改进后的维恩振荡电路实现 RC正弦振荡信号,得到实际频率为9.79 kHz,与理论9.95 kHz相差160Hz,幅值调节范围为50~1 100 mV。频率及幅值均可满足系统设计要求。
3.2 移相器
移相器用补偿相位移动,或对信号进行反相处理。需要实现0°~360°范围移相,并且有相位精调功能。采用全通滤波器设计,其特点是保持增益为1,调节时间常数可调节移相范围。图1为移相器原理图及相移曲线。其传递函数为:

为使得9.79 kHz信号移相90°,设计移相器参数如下:R=1.6 Ω,R1=10 kΩ,C=10 nF;欲实现-90°移相,只需将图1a中R与C调换。故选用与90°移相器相同参数即可实现-90°移相。180°移相可采用反相器实现。相位微调仍可采用全通滤波器实现,将其中的R或C换成可调的器件即可。保持C不变,设定R的变化范围为1~7 kΩ,可满足-47°~50°范围内的微调。
3.3 鉴相器
鉴相器由模拟乘法器与低通滤波器构成,可通过检测探测信号与参考信号的相位关系,给出与相位差对应的误差信号,供校准器调节使用。模拟乘法器有多种用途,如增益控制、附加增益调整、作除法、压控滤波器、鉴相器等。这里用到的是其鉴相器功能。当两路正弦信号输入乘法器,得到差频、和频两种分量信号。当信号频率相同时,滤掉和频信号,得到差频信号为一直流信号,反映两路信号的相位差。同时,相位差为0°或 180°时得到直流信号最大,这也就是要加移相器以补偿相位获得最佳误差信号的原因所在。
3.4 校准器
校准器由PI控制器、三角波发生器、模拟开关3部分构成,其作用是校正鉴相器输出的误差信号,改善系统快速性与准确性。当激光器受外界干扰跳出锁频范围时,能自动寻找峰值点,自动上锁。根据设定功能要求,图2为校准器原理。
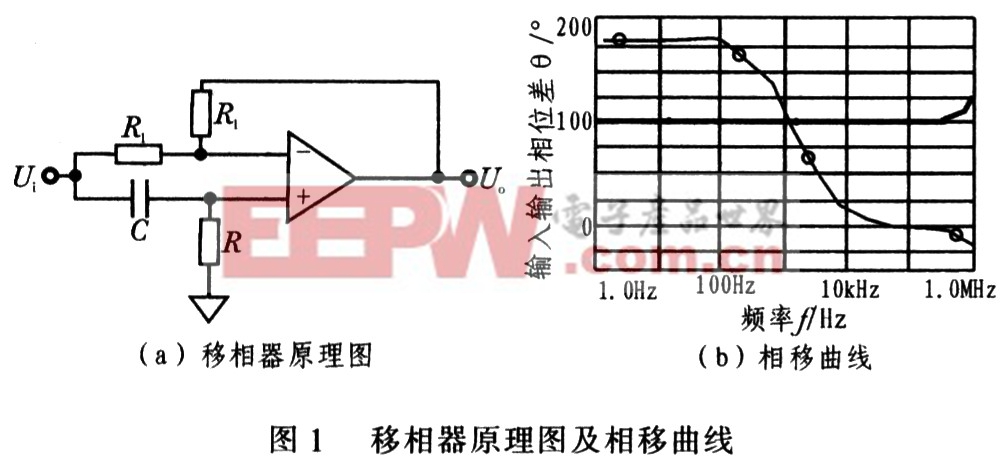
图2中,误差零点调节的作用是使误差信号经PI控制器校准输出鉴频曲线的零点与中心频率相对应。PI控制器零点调节与增益放大电路如图3所示,其中R1=2 k
- 旋转状态下动态倾角测量系统设计(10-28)
- 意法半导体在数字输出三轴加速传感器中嵌入智能功能(10-23)
- 工业应用中的测量(02-23)
- 基于ADISl6355 MEMS的惯性测量组件系统设计(03-07)
- 基于傅里叶变换的MEMS地震检波器设计(11-22)
- 基于nRF905的无线加速度测量系统设计(09-12)