微型测距雷达的原理及组成
时间:10-14
来源:互联网
点击:
共有64阶滤波器,128级Q值控制。同时也可以控制振荡频率,由多片MAX262组成,使窄带滤波器的阶数达到几百甚至上千。控制Q值的不同,在频率的低端到高端,可以将窄带滤波器的3 dB带宽设计成相同或相近的宽度。 2.4 放大与AGC放大电路 前级放大电路可采用各公司的低噪声运放,AGC电路选用AD公司的AD603,或BB公司的VGA610,放大整形可选用TI公司或其他公司新出的R~R输出的运放。 2.5 单片机 单片机选用Atmel公司的AT89C51,也可选用其他公司的单片机,如PIC或AVR系列。这些单片机都是低成本且为人们所常用。 3 软件组成 软件用汇编语言编写,流程图如图3所示。 4 结语 低成本微型测距雷达经实验在原理上是行得通的,但距离较近,实际测试后发现微波头采用直接混频方式输出灵敏度较低。下一步改进需要增加一个中频,放大后解调,再进行视频放大。 对于要求测距更远的雷达,可通过增加发射功率,增大天线面积的方法。当功率较大时,考虑到连续波雷达泄露的影响,需要将发射天线与接收天线分开。对于更近距离的测量,例如小于2~3 m,可采用超声波测量。微型测距雷达的用途非常广阔,今后必将大量用于民用的许多领域。 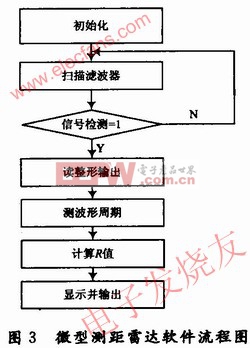
- 低成本微型测距雷达设计(09-14)
- IC测试原理解析(第二部分)(03-26)
- IC测试原理解析(第四部分—射频/无线芯片测试基础)(03-26)
- 两种示波器示波原理分析法的比较(06-27)
- 示波器基础原理入门指南(上)(02-06)
- 液体流量计安装使用注意事项(01-06)