设计和运用发动机低频振动信号采集系统
摘要:介绍了针对康明斯6BT5.9 型柴油发动机机体侧壁产生的低频振动信号的数据采集系统,该系统综合运用了RS232 串行通信技术、单片机技术以及数据采集技术,整个设计由振动传感器、数据采集板、PC 机应用程序3 部分组成。实验表明该系统具有稳定、可靠、实时、性价比高等优点。
1 引言
柴油机是往复运动机械,其激振力主要来源于活塞-曲柄机构周期性运动时产生的惯性力,以及气缸内气体燃烧产生的周期性气压力。将传感器垂直安装在气缸体与曲轴箱的连铸体侧壁采集的机体低频段振动信号直接反映了柴油机工作中振动激励源的信息。因此,采用发动机低频振动采集系统进行故障测试诊断方面的研究对尽早发现并排除故障隐患、防止事故发生、提高柴油机的经济性有着重要的现实意义。目前,通过PC 机的RS232 串行接口与外部设备进行通讯,是许多测控系统中常用的一种通信解决方案,但当其以查询方式接收数据时,用户只能等候在计算机当前界面而不能进行其它操做, 直到数据接收完毕。本系统运用VS .2008.C# 线程管理功能决了这一问题,改善了人机交互环境, 优化了系统性能。
2 系统简介
发动机低频振动信号采集系统由3 部分组成:振动传感器、数据采集板、PC 机应用程序,整个系统结构如图1 所示。应用北京通磁伟业传感技术有限公司生产的ZD24(DC5V)型振动传感器将EQ6BT5.9 型柴油发动机机体表面的机械振动转变成0~5V 模拟电信号。数据采集板利用AT8 9 S5 1 微控制器以采样频率1 . 6 kHz 驱动ADC0832 完成A/D 变换并将数据经美信公司的RS223接口芯片MAX232 传输给PC 机。PC 机上的应用程序通过C#2008.NET 3.5 框架下的线程类和SerialPort 类很好地实现了PC 机与数据采集板之间的实时数据通信并将采集到的振动数据保存为txt 文本文件供MATLAB生成的COM 组件对其进行FFT 分析与显示。

图1 柴油发动机低频振动信号采集系统结构图。
3 系统硬件设计

图2 数据采集板框图。
图2 是数据采集板框图,该板主要由单片机AT89S51、A/D转换器ADC0832、电源模块DC/DC 等组。数据采集板采用RS232 串口方式与外界通信,其原理图如图3。

图3 数据采集板原理图。
4 系统软件设计
系统软件设计包括两个部份:固件程序设计、PC 机应用程序设计。二者互相配合,才能完成可靠、实时的数据采集与传输。固件程序是用C51 语言编写的,主要作用是启动A/D 转换、发送数据,上位机程序是用最新的C# 3 . 0 语言编写。
4.1 固件程序设计
固件程序(又称单片机程序)是指固化到徽控制器模块内的程序。本系统的固件程序是采用C51 开发完成的, 其流程图如图4 所示。
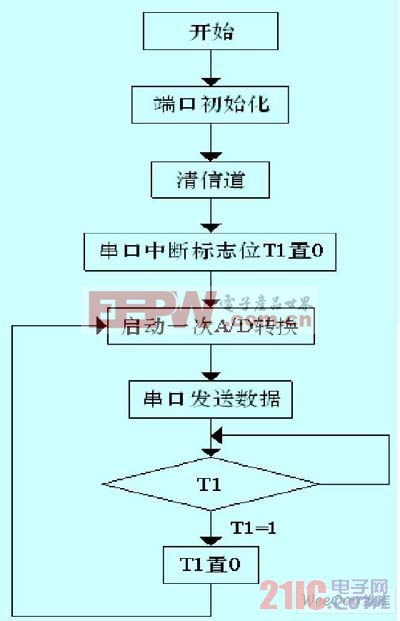
图4 固件程序流程图。
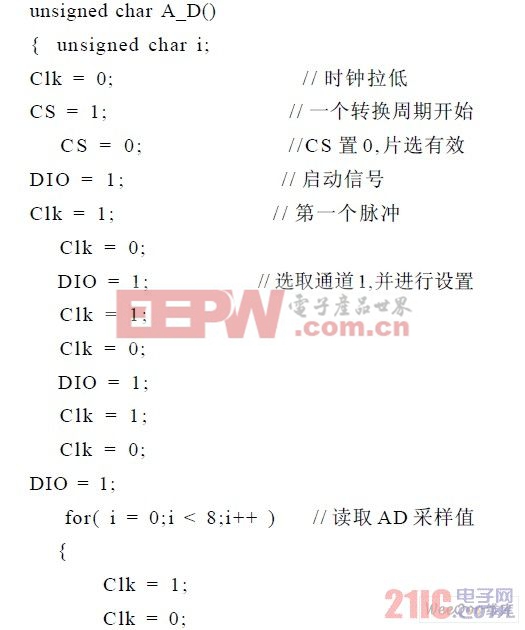
固件程序设计中的核心部分是A/D 转换程序。当上位机准备好后, 加电启动采集板自动启动A/D 转换。
具体的A/D 转换程序如下:


4.2 PC 机应用程序设计

图5 PC 机数据采集界面。
应用程序是系统与用户的接口, 它通过线程和SerialPort 类完成对数据采集板的通信和控制。使用线程后, 程序在以查询方式接收数据的同时, 用户则可以进行其它操作。C# 串行类( Ser i a l Por t ) 是Vi su a lStudio.Net 2008 中一个的类,属于System.IO.Ports 命名空间, 将它与线程结合开发的应用程序具有功能强大、界面友好、高效简便、通信快速、实时性好等特点。数据采集界面如图5。
4.2.1 C# 串行类的初始化设置
对串口进行初始化设置,由Ser ialPort 对象的参数可知主要包括设置串口号,波特率,奇偶校验位, 数据位数,停止位数等。以下为各参数所代表的含义并实例化一个串口对象:

4.2.2 读操作
从串口输入缓冲区的同步读取一个字节操作通过执行S e r i a l P o r t . R e a d B y t e ( ) 来实现的, 串口类ReadTimeout 属性可以设置读取操作未完成时发生超时之前的毫秒数。当程序以查询方式接收到数据采集板发来的数据后, 串行类执行此读方法。
4.2.3 计算采样频率
由于固件程序是用C51 语言编写的,存在计算采集频率的困难。本系统通过在C # 3 . 0 中调用Q u e r y P e r f o r m a n c e F r e q u e n c y ( ) 和QueryPerformanceCounter()两个Windows API 函数对接收数据程序段采用精确计时的方法,巧妙的实现了系统采样频率的精确计算。它们的引用代码如下:

经计算,本系统的采样频率fs=1600Hz。根据采集定理,当信号在最高频率fmax 时,采样频率fs ≥ 2fmax就能使采样信号不发生“混叠。”通常,把最低允许频率fs = 2fc 称为Nyquist 频率,工程中,为可靠起见,常取fs≥(3~4)fmax。根据振源的实际情况(康明斯6BT5.9 型柴油发动机机体侧壁产生的低频振动信号) , 设定采样32768 次,用时20.48 秒。
- 发动机内部涡轮横动系统开发(05-15)
- Viper喷气发动机测试台:集成软硬件的数据采集平台,提供灵活性和可靠性(05-15)
- 基于发动机性能虚拟仪器测试系统设计(05-12)
- 发动机测试的便携式振动分析仪(09-21)
- 基于虚拟仪器的柴油发动机测控系统(10-04)
- 基于eCAR平台的发动机控制器测试系统(01-12)