基于LabVIEW的重力仪仿真与测试系统设计
信号输入。航迹模块则主要对载体运动过程进行设计,记录载体经过设定路线每一点时的时间、位置、速度。重力仪模块则主要完成重力仪传感器数字化设计。根据不同条件下连续系统的重力仪传感器模型,设计对应的离散化传感器模型。为了便于理论分析,程序将会自动保存模拟器输出数据。 当只有正弦信号输入模拟器时,模拟信号输出区的图形显示理论上模拟器输出电压。此时,通过测量6208卡的输出,得到实际电压输出的波形如图5所示。从图5可以看出,6208卡输出电压与理论输出电压相符合,但噪声影响比较大。 在三者共同作用,并且输出叠加量测噪声情况下,模拟器的输出曲线如图10所示。
3 模拟器实现
程序采用面向对象的可视化编程语言LabVIEW对重力传感器模拟器进行开发设计。程序设计包括可视化参数输入的程序设计、利用传感器模型进行解算的程序以及模拟量输出的程序设计,通过点击按钮弹出的对话框输入各种传感器的输入参数,在图形显示区实时输出模拟器的输出电压值曲线。在主界面上通过点击各个按钮,可以弹出各个输入参数的界面,在图形显示区,实时显示出模拟器所输出的电压值,该电压值正对应实际海洋重力传感器经过信号转换和放大后的模拟信号。海洋重力传感器模拟器主要包括以下几个方面的参数输入。
3.1 航迹输入
的数值只与重力测量载体的航速、航向和测地点纬度有关,故在模拟器设计时,需要真实反应实际情况。而这3个参量均是通过航迹线推算得到。故程序开始时刻,需要首先设定初始位置、航向和航速,进行航迹规划。然后计算值大小,并将该值加入传感器的输入信号中。航向角按照北偏东格式定义。如果输入45,则代表航向角为北偏东45°。根据一般水下航行器的速度,航速设定其范围为4~24 km。
3.2 重力值输入设定
由于海洋重力测量都属于相对重力测量范畴,重力仪所测量的是测地点和重力基点之间的差值,故在给定重力仪的输入量时,应给出重力基点值g0和测点实际重力值g,程序根据二者解得重力仪所能敏感的重力差值。在模拟器中,二者之间的差值选用正弦波进行模拟。重力变化周期应至少大于120 s(实际地球重力异常周期一般均大于120 s)。一定区域内,重力可能没有变化。此时,重力变化周期为∞。设计模拟器时,输入重力信号的周期不可能在一个无限变化的范围。考虑到输出曲线的时间范围,论文设定重力变化值输入周期为120~1000s。
3.3 扰动加速度输入
由于载体垂直方向周期性附加加速度可以用下式表示:
这样便完成电压量的输出。当结束定时循环时,需要放弃对6208卡的控制,以便其他进程能够对卡进行操作。关键代码为:
3.6 程序主界面及电压输出
模拟器主界面如图4所示。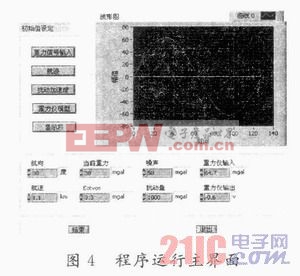
4 程序运行结果及分析
不同的输入下,模拟器输出不相同。在重力信号、效应、干扰加速度、量测噪声等单独作用下,根据自动保存的数据值,模拟器的输出曲线如图6~图9所示。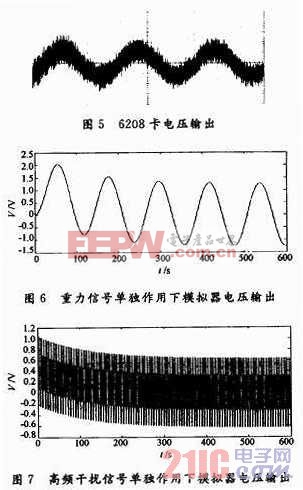


根据海洋重力仪相关理论,本文利用采用面向对象的可编程语言LabView,设计了重力仪模拟器,模拟海洋重力仪工作的工作过程,给出不同状态下的海洋重力仪的响应。为了对海洋重力仪输出信号进行分析和采集。
- 基于LabVIEW RT的自定义流程测控系统(10-30)
- 基于LabVIEW的语音分析平台的实现(10-30)
- 基于示波器卡和LabVIEW的马达编码器测试系统(11-06)
- 基于虚拟仪器的网络虚拟实验室构建(11-06)
- 运用LabView控制DS3900串口通信模块(02-02)
- 采用模块化仪器,对新兴音频和视频应用进行测试(02-19)