CPLO在电机测速系统中的应用
1 引言
在大多数情况下,电机的转速是对其进行闭环控制时必不可少的量,由于对电机的控制大多要求检测到的速度必须实时和精确,这就需要测速系统能高速且精确地将速度检测出来。
由于CPLD的集成度很高且速度很快,比较容易满足测速系统的要求,同时使系统可靠性比采用通用IC芯片更高。另外,CpLD还具有设计方便、灵活和校验快的特点,并且设计可随时改变。随着CPLD性能和集成度的不断提高,同时成本和价格的不断降低,使其得到日益广泛的应用[1一2]
2速度测量原理
在传统的电机转速检测中,可以采用测周法(简称T法)和测频法(简称M法)两种方法。
测周法是通过测量速度脉冲周期来获得电机转速的方法,适用于测量低的转速;测频法是通过测量速度脉冲频率来获得电机转速的方法,适用于测量高的转速f3l。然而,在电机的旋转过程中,电机的速度范围变化很大,若想准确且实时地检测出电机的转速,需要在测周法和测频法这两种方法间进行切换,为避免这种切换,可采用M/T法。
M/T法的原理:给定一个频率较高的定频信号作为标准频率信号Fl,并保证测量的闸门时间为被测速度脉冲信号F2的整数倍,在闸门时间同时对信号Fl和信号FZ进行计数。其原理图如图1所示。
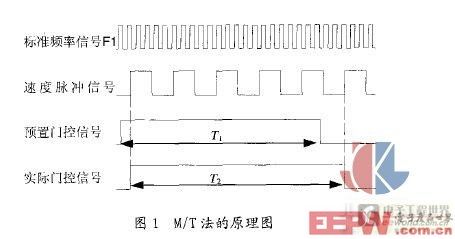
在测量过程中,根据电机实际的转速情况设定预置门控信号的高电平时间(预置闸门时间)Tl,在预置门控信号的上升沿到来时,系统并没有开始计数,一直等到信号F2的上升沿到来时,才开始用两个计数器分别对信号Fl和信号F2的脉冲个数进行计数。在预置门控信号的下降沿到来时,计数器继续计数,需等到信号F2的上升沿到来时,才停止计数,同时读取此时两个计数器的计数值。这样,实际的计数闸门时间为几。设信号F1的频率为fl,在兀时间内信号Fl和信号F2的脉冲个数分别为Nl,从,则被测速度信号FZ的频率九可由下式求得:

在这种方法下,当速度信号的周期大于预置闸门时间Tl时,相当于采用的是测周法,而当速度信号的周期小于Tl时,则采用的是测频法。所以,根据电机转速的快慢,M/1,法自动完成了T法与M法间的切换。另外,由于计数器总是在速度脉冲信号的上升沿到来时开始或停止计数,这就保证了实际测量的闸门时间为被侧信号的整数倍,从而实现了信号在频率测量范围内的测量精度相等,所以该测量方法同时实现了宽频带和高精度测量的要求。

3基于CpLO的速度测量实现
速度测量的电路结构图如图2所示。图2中,在Fl,F2输入端口分别输入标准频率信号Fl和待测的速度脉冲信号F2,计数器1,2分别实现对信号Fl,F2的脉冲个数的计数,锁存器1,2分别实现对计数器l,2计数值的保存。输入端口NP有8位,作为预置闸门时间的设定端口,设其输入值为NP,则预置闸门时间T1为:

在电路刚开始工作时,由清零信号CLR对所有计数器、锁存器和D触发器清零。这样,计数器1的计数值NNI的初值为0,故此时NP>NNI,比较器输出为1,但此时Dl触发器的输出F4仍保此初值0,由于F4作用在计数器1,2的使能端,此时计数器没有开始计数,直到信号F2的上升沿到来后,Dl触发器的输出F4才翻转为l,允许两计数器计数。随着计数值的增加,当NNI>NP时,比较器输出等于o,不过此时计数器仍在计数,直到信号F2的又一上升沿到来后,F4二仇计数器停止计数,利用F4的下降沿(邢的上升沿)将此时的计数值NNI,NNZ分别通过锁存器1,2锁存起来。然后利用此时F4=0,经DZ触发器延时到信号F1的上升沿到来后,对计数器l,2清零。延时清零的原因是为了避免锁存器锁存数据与计数器清零同时进行,从而使存储数据出错。但由于延时清零,使实际门控信号的上升沿比速度信号F2的上升沿滞后,滞后时间为信号Fl的一个周期。为使检测结果准确,将计数器1的计数值加1即可。
整个电路的仿真结果见图3,仿真时,将NP的值设为60。从仿真结果申可以看出,F4实质上便是实际门控信号,在F4的第1个上升沿,计数器1,2开始计数,计数值的变化情况见NNI和NNZ的波形。在F4的下降沿(同时对应信号F2的上升沿),锁存器将计数值锁存起来,得到计数值Nl,从,接着对计数器1,2清零。从图中可以看出,从=8,代表在实际阿门时向内,捕获了8个速度脉冲,同时对标准信号脉冲个数的计数值为65_(N1=65)o在下一个速度脉冲信号F2的上升沿到来后,开始第二轮测量,测量过程与第一次相同,不过由于速度信号的改变,使这次的实际闸门时间变短(Nlo62),而此时记录了19个速度脉冲个数(从=19)。
在设计电路时,需考虑计数器溢出的情况。例如,在电机转速很慢的情况下,两个速度脉冲信号上升沿间的时间间隔较长,这很长,在该段时间内,计
- 星辰伺服系统在定长横剪生产线上的应用(02-17)
- 使用LabVIEW软件为自动化麻醉系统开发闭环控制方法(09-01)
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)