�ĵ����������Զ�����е�Ӧ��
����1������
���������ߡ��Զ����ϵͳ��,��ӵIJ���һ����ð��ݷ��������辫ȷ�����Ӱ뾶����ֵʱ,���ݷ���Ȼ��������Ҫ��Ϊ��,��Ҫ̽����������Ҫ����ּ�ʵ�õķ����������ڷ������ĵ��������ģ�͵Ļ�����,��������ֲ�ͬ���ĵ����,ͨ���������Ƚ�,���ȷ����ʵ�ʲ���������
����2���ĵ�����������ŷ���
�����ռ�Ҫȷ��һ����,�������ĸ�����,����������(a,b,c)����뾶R����Ӧ��Ҫ��֪�������ĸ����������ܽ����ĸ�����,����һ�������顣���,Ϊ��ʵ��������IJ���,����Ҫ�����ĸ�������,����ν�ĵ����
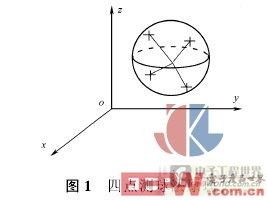

���������κβ���ϵͳ���������,������ʵ����ĵ�Pi�õ�����뾶���ڲ�������R����x,y,z���������ϵIJ�������Ϊ����,�������������:
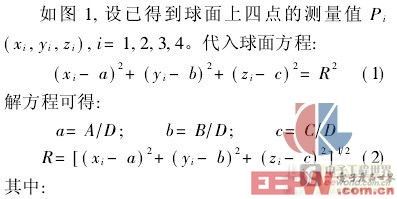
������ʽ(3)��֪,��뾶�IJ����������������������й�,����ͨ���������ò������λ��,ʹ��뾶�������ﵽ��С,���������ŷ��������۷�������,��������Ϊ����,��Pi(i=1,2,3,4)�ĵ��ڿռ乹��������ʱ,��õ���뾶�����С[1],��ͼ2��ʾ����ʱ,��R=����/2��
����3����Ӳ�������������
����3��1��������һ������
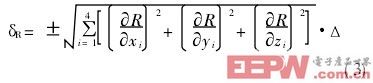
������������Ϊ�����,ͼ2�ķ�����Ȼ������ʵ�֡�����������,�ɲ���3+1����ʽ,��������������ͬһԲ�������һ���120����һ�������������㡣��ͼ3��ʾ,��֮Ϊ������һ��������
������������,����ʱ,��1��2��3��4��ɵIJ�˻����������ƶ��������ƽ�,ֱ����������λʱΪֹ����������O������Ϊ(0,0,0),��������Ϊ����ԭ��,�����Ӧ�ı����������P������(a,b,c)����뾶R���������O��ľ���ֱ�Ϊr1��r2��r3��r4��������ͼ������ϵ��,��������ֱ�Ϊ:
���������ϸ����������ʽ(1)��ʽ(2),�ⷽ����ɵ�a,b,c,R��ֵ�����ڱ�����Ӳ��ó���ϳ���ӹ�,����ӡ����ƽ�桱��������ӹ�������,���ڡ����ء���������ӹ������ϲ���,�÷����в�����ѡ��Ͳ�̫���롣
����ͬʱ,��ȷ�����������ʱ,�Dz��ò�ͷ�����λ�Ƽ���ԭ������㵽O��ľ��Գ��ȵõ���(��ͼ3)��O���Dz�ͷ4�����������ͷ1��2��3����ƽ��Ľ��㡣��Ҫ��ȷ�������ͷ��O��ľ��Գ���Ҳ�DZȽ����ѵ�,���䵱������Ӱ뾶��Сʱ����ʵ�֡�
����3��2�������Ӷ�������
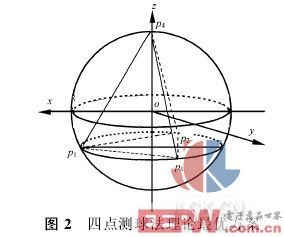
����ͨ���ԡ�����һ������������,����䲻��,�����������Ӷ�������[2]���÷������ĸ���㲼�óɶ����ԳƵ�2+2��ʽ,��ʹ������ֱ�λ�ڲ�ͬ��ˮƽ����,��ͼ4��ʾ�����1��2ͬ��һ��ƽ���ڡ����ƽ�桱��Բ������,3��4������һ��Բ�����ϡ�ͼ��������ʾΪ����ͷ���ĵĹ켣,���ڲ���ʱ��֤�����������ڱ���Ӵ�,����ͷ�뾶Ϊrʱ,�������������ͷ���ĵĹ켣�������뾶��Ϊr��ͬ�����档����,�Ա�������IJ�����ת��Ϊ�Ը���ͷ���Ĺ켣�IJ�����ͬ�������ĵ����ԭ��,ֻҪ��������ڱڽӴ����IJ�ͷ����������,��ô����ʽ(1)��ʽ(2),���ɼ����������ӵIJ���a��b��c��R��
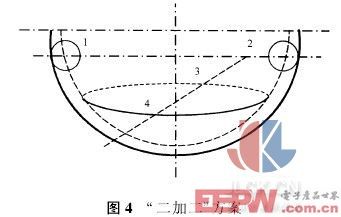
������ǰһ�������,�����Ӷ����������Կ˷��ˡ�����һ�������IJ���֮��������,���ѡ��ܿ��˼ӹ������ϲ�ļ�������,�Ӷ��������ɼӹ���������IJ�����ͬʱ,���öԾ�����,����������ƫ�ĺͶ�����Ӱ�졣ͨ���������Ƚ�,���������۵ļ�����,�������á����Ӷ���������
����4��������ʵʩ��Ӧ��
������ǰ��ķ�����֪,������һ���������ʺ���������Ķ�����ʵ��,���ڴ�����ӳߴ������(SR=7��15 mm),���ø÷���ʱ��ͷ�Ŀռ䲼��Ҳ�����ܡ���Ȼ,���á����Ӷ�������,�ڲ�ͷ�Ŀռ䲼����Ҳͬ����������,��Ҫ���ܿ��ǡ�������ơ�
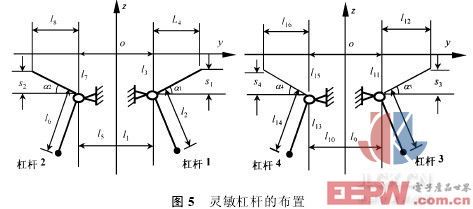
�������߲�����z������õĸ߾��ȵ��ʽλ�ƴ�����������λ�Ƶı仯,��������ı仯��z��λ�Ƶ�ת��ͨ�������ܸ˵�Ԥ�任��ʵ�֡��ĸ������ܸ�ǰ�˵IJ�㲼�óɶ����ԳƵ���ʽ,��ʹ��������z�����,�����ڲ�ͬ�߶ȵ�ˮƽ���ڡ�����,���չ��ɵ��ĵ����Ӵ������⾶�������ڦ�43 mm�ķ�Χ��,4����ͷ�Ӷ˲������̽��SR7��15 mm�İ���ӡ����иܸ�1��2λ��yozƽ����,�ܸ�3��4λ��xozƽ����,��ͼ5��ʾ��ͼ��li(i=1,2,��,16)��ʾ�ܸ˵Ľṹ�ߴ�,si(i=1,2,3,4)��ʾ������Ӳ���ʱ������������ʾֵ,ai(i=1,2,3,4)��ʾ�ܸ���ˮƽλ�õļнǡ�
����������Ӧ�Ŀռ�����Ϊ(xi,yi,zi),(i=1,2,3,4)�����ݼ��ι�ϵ,����������봫����ʾֵ���ܸ˽ṹ�ߴ缰�ռ�λ��֮�乹�����й�ϵ:
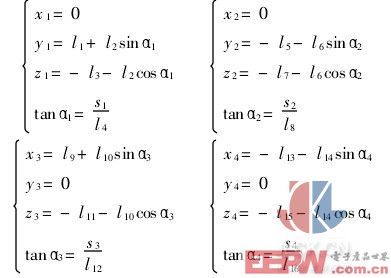
�����ݴ����xi��yi��zi(i=1,2,3,4)��,����ʽ
����(1)��ʽ(2)���������Ӳ�����
��������ԭ����Ƶ��ĵ����Ӵ������������Զ��������С��Ըô���������������(���ķ���),����Ӳ��������۲�ȷ����Ϊ��R=��0·9��m������SR7·146
�ĵ���� ����Զ���� �Զ������� ������£�
- O���ܷ�Ȧ��鼰������������(02-27)
- Ƶ����ȡ�����ʼ��ο�˹�ض���(09-14)
- ΪʲôҪ�����źŵ�����(09-30)
- IEEE802.16-2004 WiMAX����������Ͳ���(09-16)
- Ϊ���Ⲩ�η��������Ӽ�ֵ(10-27)
- ����PCI ���ߵĸ������ݲɼ�ϵͳ(09-30)