基于虚拟仪器的气动人工肌肉运动位移测量系统的实现
0 引言
气动人工肌肉也称气动人工肌肉驱动器(Pneumatic Musecle Actuator,PMA),其研究始于20世纪50代,近几年,在国内也得到了广泛的研究与应用。气动人工肌肉响应快、可靠性高,同时拥有柔性而且轻盈,这使得它对人类来说,比其他的驱动器更安全。随着机器人技术的发展需求,气动人工肌肉得到了广泛的研究。目前人工肌肉运动位移的测量主要通过在肌肉末端连接一个滑动变阻器,再通过检测变阻器两端的电压来完成,但是这种方法要求有高精度的变阻器,同时,这种方法对人工肌肉的运动也会造成一定的影响,所以,实验结果往往不很理想。本文在虚拟仪器平台下,采用视觉跟踪与图像处理方法,来完成对目标位移的测量。
1 硬件结构设计
本系统采用的是千兆网卡,Basler SCA640-70GM,659X490,70 FPS千兆网络摄像头,而且NI的PCIE-8235内嵌有帧接收器,因而极大地降低了图像采集对CPU的占用率。利用网线直接将采集到的图像传到PC机,同时也简化了系统硬件结构的设计。图1所示为系统的硬件结构图。

2 软件设计
本系统软件采用NI公司的虚拟仪器软件NILabVIEW 8.6和视觉处理工具包NI Vision8.6。通过LabVIEW图形化的编程环境,编程者可以象搭积木一样搭建程序和用户界面,而程序的执行内容由一个一个可表示函数的图标和图标之间的数据流连线构成,这可使得编写和调试程序变得生动、便捷。NI Vision是和LabVIEW无缝链接的,NI Vision里包含了目前图像处理和机器视觉比较成熟的Vis,同时有用于图像采集的驱动Vis,可在最大程度上简化图像采集、处理和输出结果的过程。
2.1 图像采集模块
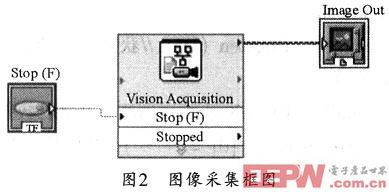
跟其它NI板卡数据采集一样,本系统的图像采集可借助于采集助手NI Vsion Acquisition来完成图像的快速采集,其程序框图如图2所示。
2.2 图像刻度转换
直接从图像中测得的坐标、面积、距离等参数都是用像素值表示的,而实际上,还要根据需要将像素值转换成设计需要的值。本设计要测出人工肌肉伸缩的长度,单位是毫米(mm),在长度测量的过程中,可将一张打印有实际刻度的纸作为气动人工肌肉的背景,这样既可以分析背景对图像处理的影响,又可以作为测量的辅助工具。图3所示是其图像刻度转换指示图,图中,可取0mm和50mm的图像坐标分别为(1126.000,641.000)和(1510.000,641.000),这样,其像素长度为384.000pixel对应实际的50mm,在此基础上,其伸缩长度单位转换都将以此为标准在程序中自动进行。

2.3 特征点的提取
对于图像处理系统,实时性是经常要关注的问题。本系统的实时性也是首先要考虑的问题。为了最大限度地提高系统的实时性,除了提高硬件配置外,在软件处理过程中,也应该尽量避免使用占内存和CPU颅腔多的算法。本设计需要获得气动人工肌肉两端金属扎环的图像信息,并以此来计算伸缩长度。为了使特征信息便于提取,可在两个金属扎环的中间位置用红色油漆标记,并将右端的红点作为辅助坐标。
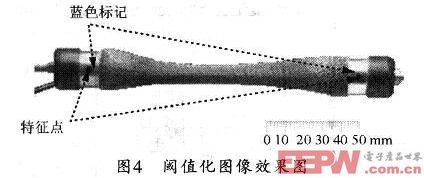
为了提高实时性,可用最简单的阈值划分法来分割图像,以获取特征信息、阈值设定值Red(min:195,max:255),Green(min:10,max:50),Blue(min:10,max:50),图4所示是其阈值提取效果图,其中,蓝色部分为提取到的特征信息。处理后的二值图像如图5所示。
2.4 目标检测与距离测量
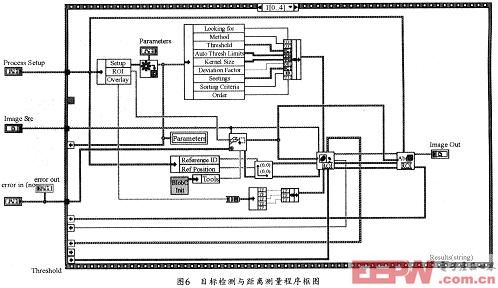
检测出提取到的信息点后,还应测得它们的坐标,进一步求得它们的距离,这可由measuresdistance VIs和Caliper VIs来完成,其部分程序框图如图6所示。
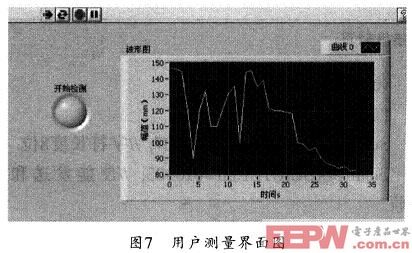
3 用户测量界面
根据LabVIEW的编程特点,为减少CPU的使用率,可将中间过程中图像处理显示界面省去或隐藏,在用户界面上只显示测量曲线,图7所示是本系统的用户测量界面图。
4 结束语
本文在虚拟仪器软件LabVIEW平台下开发的气动人工肌肉运动位移测量系统具有较好的可靠性和实时性,但在软件和硬件调试过程中也发现了一些弊端,如视觉处理系统对光照的要求比较高,而且摄像机和被测物体的距离要绝对的固定,否则所有测量结果将出现较大程度的偏差,所以,在软件设计过程中应该考虑到这些因素,应将程序设计成为向导式的结构,并提高系统的移植性,这也是本系统需要完善的地方。
- 虚拟仪器:在开放架构基础上创建用户定义的测试系统(09-19)
- 什么是虚拟仪器?(10-23)
- 基于虚拟仪器技术的短波电台自动测试系统(10-23)
- 宽带多媒体网关测试方法研究(10-27)
- 采用模块化仪器,对新兴音频和视频应用进行测试(02-19)
- 基于虚拟仪器技术的航空机载电子设备自动测试系统(03-03)