GPS软件接收机关键技术研究及实现

由GDOP的几何意义可知:GDOP大将导致定位误差的均方差大。当对定位结果滤波后,定位输出的抖动较为平缓,方差较小,尤其对于DOP比较大的数据,能够有效地提高定位精度。
由静态实验可知,本文设计的SR的定位结果和G2L的定位结果非常接近,定位精度较高,定位方差较小。
4.2 动态定位结果
进行跑车试验的地点在拐弯处。对NS采集得到的中频数据经过SR处理,得到动态轨迹数据P1;将S1经过卡尔曼滤波处理得到轨迹数据P2;G2L存储的这段路程的轨迹数据为P0。以G2L的起始点位置为原点,建立当地水平坐标系ENU,分别计算P1,P2,P0各点在此坐标系下的位置(E,N,U),可得水平轨迹曲线如图2所示,天向轨迹曲线如图3所示。
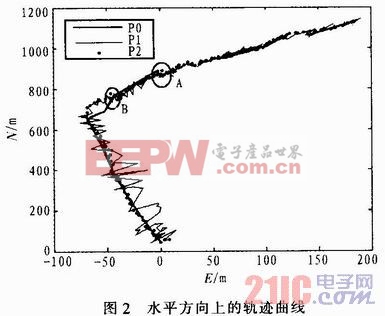
从图2可以看出,在拐弯处,G2L定位结果出现回旋,如图中A、B点所示,与实际前进轨迹不符,可知这段位置误差较大;SR定位结果滤波前得到的位置曲线抖动较大,滤波后的位置曲线与硬件接收机的位置曲线基本重合,而且在拐弯处,滤波后的输出结果更平滑,与实际行进轨迹相符合。

由图3可以看出,在高度上G2L的输出有两处大的跳跃,如图中的C、D点处,这与实际的平缓路面不一致,这是由于实验车从桥下穿过,导致部分卫星信号中断,造成定位输出跳跃;SR滤波前的高程曲线抖动剧烈,和实际不符;而滤波后的高程数据比较平缓,高度变化趋势与硬件接收机一致,这也与实际情况吻合。由动态实验可知,文中设计的SR的定位结果和G2L的定位结果非常接近,定位精度较高。
5 结论
文中设计并实现了一种基于FFT的码相位并行的快速信号捕获方案,对定位解算的数据进行卡尔曼滤波处理,提高了定位精度及定位方差,并通过静态与动态丽个方面进行实验验证,结果表明,本文设计的软件接收机定位精度较高,定位均方差较小,在GDOP小于3.9时,水平方向小于7 m,高度方向小于6m。
- 基于GPS的电压向量测量的新方法及其应用(10-30)
- GPS测量误差(10-09)
- 欧洲伽利略计划使用Pendulum时间/频率方案(11-03)
- 如何降低GPS测试成本(11-26)
- 可检测差分GPS校正信号的窄频移数字鉴别器电路(04-12)
- 基于RS485总线的自动化检测系统的研制(04-15)