ADISl6209 IMU在倾角测量中的应用
中SUPPLYOUT,AUX ADC和TEMP OUT的数据格式都为二进制数据,可以使用以下公式进行解算:

式中:VALUE代表实际的测量量的值;DATA_VAL_UE代表寄存器的值;Scale代表寄存器每个最小单位代表的实际值;n为对应寄存器的数据位数。
XACC_OUT,YACC_OUT,XINCL_OUT和YINCL_OUT输出的数据格式均为14位2的补码,可以使用以下公式进行解算:
式中:DATA_VALUE为寄存器的输出数据;VALUE为转换后实际的测量量的值;Scale为寄存器值最小值代表的最小单位;n为对应寄存器的数据位数。
2 基于Luminary LMS8962与ADISl6209的倾角测量系统设计
下面介绍基于Luminary公司的LMS8962与ADISl6209的倾角测量系统的原理与设计。
2.1 倾角测量原理
加速度计是测量物体所受除万有引力加速度以外的加速度。将ADISl6209静止放在水平面时,其受到的是水平面对其向上的支撑力的加速度和地球自转的向心加速度的矢量和。而地球自转的向心加速度很小,在测量中忽略不计。那么只要使得ADISl6209将一个加速传感器的输出摆置为O时,也即是将传感器摆置如图3(a)所示。或者两个加速度计测得的矢量和等于水平面对其向上的支撑力的加速度,也就是重力加速度的反方向矢量,也即是将传感器摆置如图4(a)所示。那么就可以利用这些矢量求出传感器与水平的倾角关系。
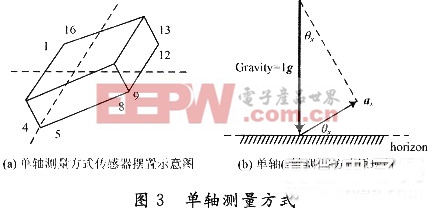
当使用单轴测量方式时,如图3(b)所示,可知Ay轴测得的分量为O,Ax轴测得的分量为ax,那么Ax轴与水平面的夹角:
同理可以得到使用Ay轴作单轴测量方式时,Ay轴与水平面的夹角:
当使用双轴测量方式时,如图4(b)所示,传感器Ax与Ay轴组成的平面垂直于水平面,那么重量加速度
轴测得的分量为ax,那么Ax轴与水平面的夹角:
Ay轴与水平面的夹角:

2.2 硬件电路设计
本文使用Luminary公司的LMS8962与ADISl6209搭建成倾角测量系统。LMS8962是一款高性能的32位Cortex-M3内核微处理器,它有丰富的片内外设,如模/数转换(ADC),PWM,CAN和串行总线(SSI)等,功能强大,易于集成。
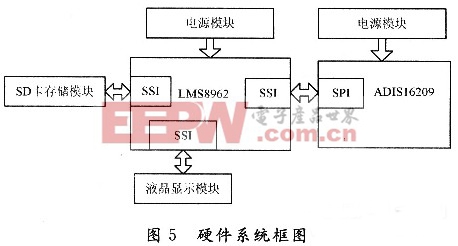
如图5所示是由LMS8962与ADISl6209组成的倾角测量系统。LMS8962通过SSI总线(SSI是串行通信总线,它兼容SPI总线。)与ADISl6209进行通信。将采集到的数据存储到SD卡中,将解算得到的结果实时在LCD上显示出来。
2.3 软件设计
如图6所示是系统的软件流程图。程序启动进入系统初始化,接下来向ADISl6209写控制指令,以设置ADISl6209工作在需求的模式下,然后读取返回的数据并进行解算,最后通过存储数据到SD卡中并在液晶模块中显示出来。