基于PXIe和LabVIEW的动物运动力学数据采集系统

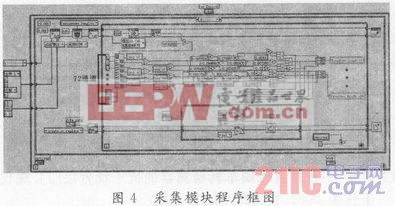
LabVIEW程序使用条件结构(Case Structure)执行空采集(0)、初始化(1)、采集(2)和停止(3)程序,同时用While循环控制每个具体程序的执行,为防止发生意外情况,程序最外层的While循环可以随时终止程序。下面以程序的核心部分采集模块为例,说明程序的流程。采集模块主要包括硬件配置、数据读取、数据显示和保存,如图4所示。限于篇幅,图4省略了72通道中的部分通道。
硬件配置时要注意以下几点:
(1)DAQmx物理通道的选择,桥信息、应变计信息的设置要与传感器和数据采集卡的参数一致,避免采集的信号产生畸变。
(2)选择合理的采样频牢。为了能够较好地再现原始信号,不产生波形失真,采样频率必须足够高,但过高的采样频率又会加重机器的负担,根据奈奎斯特理论,采样频率至少足原信号的2倍,但实际中,一般都需要5~10倍。通过运用Matlab软件对实验数据进行频谱分析和长期实验经验的积累,设定程序的采样频率为500~1 000Hz。
(3)DAQmx读取时,每个通道的采样数要小于或等于采样频率,否则可能会因为数据溢出而影响程序的正常执行。
将读取到的数据乘以传感器的灵敏度系数矩阵(解耦系数矩阵的逆矩阵),通过三维数组后,在波形图中显示出来,每个波形图显示一个传感器采集到的三维接触反力。点击前面板中的保存按钮执行数据保存功能,可以按照指定的保存路径和文件名完成数据的存储,保存格式为txt文本文件。由于系统以500~1000 Hz的采样频率采集72通道的数据,将产生大量的实验数据,所以需要有足够的存贮容量。
4 应用实例
使用大壁虎(体重:(65.4±2.4)g;体长:(136.6±12.4)mm;mean±s.d;编号为1~16号)作为实验对象,通过动物运动力学数据采集系统测试大壁虎在空间不同倾斜表面上的运动力学信息。实验时,开启测试系统并完成设备初始化,一切正常后,将大壁虎平稳地放在测试平台通道的一端,通过人工刺激,大壁虎经过传感器阵列通道爬向另一端。壁虎运动开始时,单片机发送触发信号给PXIe系统数据采集时钟卡和高速摄像机,同步采集力学数据和图像数据。根据采集到的图像信息,采用图像识别的方法,选择大壁虎运动过程中方向和速度没有显著变化,并且将全脚掌与传感器接触的数据作为有效数据。
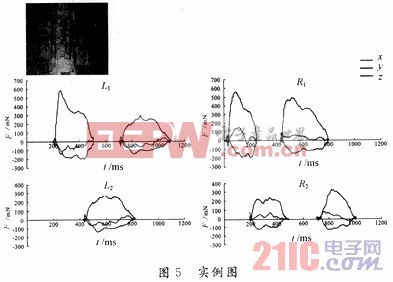
图5是大壁虎在105°表面爬行时的图像和力学信息.L1,L2,R1,R2分别代表大壁虎的左前腿、左后腿、右前腿和右后腿。从大量的实验结果来看,系统能够精确获得动物在运动过程中各个脚掌与运动表面间的接触力变化趋势及运动协调行为,这为深入理解动物保持高灵活性、机动性和稳定性的深层力学原因提供了理论依据。
5 结语
基于PXIe和LabVIEW的动物运动力学数据采集系统,解决了动物运动力学数据采集系统中的多通道、高采样率和大量数据实时存储等问题,能够精确获得动物在运动过程中各腿掌的接触反力变化过程以及身体运动姿态的调整过程。这为探索和发现动物运动力学规律提供了重要的方法,也为仿牛机器人的研究提供了理论基础。
- 基于LabVIEW RT的自定义流程测控系统(10-30)
- 基于LabVIEW的语音分析平台的实现(10-30)
- 基于示波器卡和LabVIEW的马达编码器测试系统(11-06)
- 基于虚拟仪器的网络虚拟实验室构建(11-06)
- 运用LabView控制DS3900串口通信模块(02-02)
- 采用模块化仪器,对新兴音频和视频应用进行测试(02-19)