基于自由摆的平板精确控制与激光追踪系统

3 系统硬件方案
3.1 电源模块
本系统电源电路采用LM2596与LM1117-3.3组合构成。LM2596开关电压调节器是降压型电源管理单片集成电路,能够输出3 A的驱动电流,同时具有很好的线性和负载调节特性;采用150 kHz的内部振荡频率,属于第二代开关电源调节器,功率小、效率高;LM1117-3.3是低压差线性电压调节器,可以固定输出3.3 V电压,输出电流可达800 mA。MSP430F5438单片机最小系统需要3.3V供电,因此采用LM1117-3.3给单片机供电。
3.2 数据采集模块
本系统的数据采集模块采用WDD35D-4精密电位器,精密电位器由一个电阻体和一个转动(或滑动)系统组成。当电阻体的两个固定触点之间外加一个电压时,通过转动(或滑动)系统改变触点在电阻体上的位置,在动触点与固定触点之间便可得到一个与动触点位置成一定关系的电压。利用MSP430F5438单片机内置A/D转换器读取精密电位器两端电压值,实现数据采集功能。
3.3 控制模块
选择MSP430F5438单片机进行系统控制。在系统运行过程中,单片机通过内置A/D转换器读取数据采集模块采集的数据,然后进行数据处理,根据处理结果控制步进电机驱动芯片TB6560,最终控制步进电机按要求转动。MSP430系列单片机是16位单片机,采用了精简指令集(RISC)结构,具有丰富的寻址方式、大量的寄存器以及片内数据存储器,可参加多种运算,同时具有高效的查表处理指令。MSP430F15438是基于闪存的产品系列,具有集成外设USB、模拟比较器、DMA、硬件乘法器、RTC、USCI、12位DAC等。
3.4 步进电机驱动模块
步进电机驱动模块采用东芝公司的低功耗、高集成两相混合式步进电机驱动芯片TB6560。其主要特点有:内部集成双桥MOSFET驱动,最高耐压40 V,单相输出最大电流为3.5 A。步进电机驱动电路原理图如图4所示,引脚VMA、VMB是步进电机驱动电源引脚。OUT_AP、OUT AM、OUT BP、OUT_BM引脚分别与步进电机的两相接口相连,当芯片输入端接收到单片机输入信号时,这4个引脚会执行单片机的命令使步进电机进行相应转动。NFA、NFB分别为电机A、B相电路检测端,所接电阻为0.2 Ω。PGNDA、PGNDB、SGND则是地线引脚。通过单片机MSP430F5438的I/O口与TB6560芯片的CLK、ENABLE、CW/CWW引脚相连,从而实现单片机对步进电机的控制。

4 系统软件设计
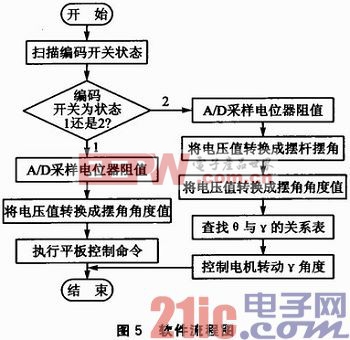
由于系统功能有两个,需要在不同的模式下运行,故程序设计采用状态机的设计思想,根据编码开关的不同状态,进入不同的模式控制,具体设计流程如图5所示。程序开始后,扫描编码开关的状态,当系统扫描到编码开关的状态为状态1时,系统执行平板控制命令;当系统扫描到编码开关的状态为状态2时,系统执行激光追踪命令。
5.1 平板控制测试
根据设计要求对系统平板控制功能的稳定性进行测试,测试方法为直接计数法。将单摆拉至60°,在平板上放置8枚硬币,松开单摆,记录单摆摆动5个周期后平板上剩余硬币的数目。统计结果用直方图表示,如图6所示。其中,横坐标表示平均每次剩余硬币数目,纵坐标表示测试次数。测试表明,随着测试次数的增加,平均剩余硬币数目也随着增加,平板控制功能趋向稳定。

5.2 激光追踪测试
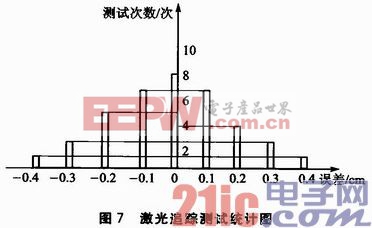
根据设计要求对系统激光追踪功能进行测试,测试方案选用多次测量取平均值的方法。按图3所示,在靶纸上确定靶心的位置,打开激光笔;启动系统,在自由摆摆动过程中,观察并记录激光笔在靶纸上的红色光斑与靶心的最大距离,这个最大距离就是本激光追踪系统的误差。按照上述方法多次测量,统计后得出激光追踪系统的误差范围和稳定程度。具体结果如图7所示,其中横坐标表示误差大小,纵坐标表示测试次数。经计算误差平均值为0.13 cm。测试表明,随着测试次数的增加,误差平均值逐渐减小,激光追踪性能较为稳定。
本设计基于自由摆,以MSP430F5438单片机为控制核心,设计并实现了精确控制与激光追踪系统,通过MATLAB建模实现了硬件与软件的结合。经过测试,在误差允许的范围内验证了系统可以实现基于单摆的平板精确控制与激光追踪功能。
- 二维烟箱缺条检测技术研究(01-14)
- 电容式二维烟箱缺条检测设计(02-05)
- 5G WiFi时代,802.11ac设备面临的大批量测试挑战(09-05)
- 理解罗姆传感器战略(09-27)
- MIMO及其对无线局域网产品生产测试的影响(09-04)
- Altair仿真技术可助电子产品更具竞争力(12-16)