基于自由摆的平板精确控制与激光追踪系统
摘要:以TI公司的MSP430F5438单片机为控制核心,结合步进电机和精密电位器WDD35D-4,实现了基于自由摆的平板控制与激光追踪系统。当摆杆摆角为45°~60°时,平板可以承载8枚一元硬币,并在5个摆动周期内维持稳定;当摆杆摆角为30°~60°时,固定在摆杆平板上的激光笔可以在15 s内找到并跟踪1.5 m远处的靶心。
关键词:MSP430F5438;激光追踪;精密电位器;自由摆
引言
随着现代科学技术的发展,基于嵌入式系统的自动控制在工业中得到了广泛的应用。目前,工业生产的机械复杂度越来越高,单纯在静止条件下的自动控制已经不能满足人们对测控系统的要求,因此,研究如何在动态条件下对系统实施精确测量与控制是十分必要的。本文介绍了一种基于自由摆的平板精确控制与激光追踪系统。在现代工业中,这种系统可以适应工业发展,应用在复杂度较高的自动化生产中,在生产过程中可以同时完成测量与控制,提高生产的自动化程度。
1 系统结构
1.1 系统整体结构
系统整体结构如图1所示,主要由控制模块、采集模块、步进电机驱动模块、步进电机、自由摆平板和激光笔,以及调试模块组成。其中,采集模块采用WDD35D-4精密电位器,当自由摆摆杆摆动时,电位器的阻值会发生变化,从而反应摆杆的位置信息。控制模块采用低功耗单片机MSP430F5438作为处理器,MSP430F5438内置A/D模块,可以采集精密电位器反馈的模拟信号。步进电机驱动选用东芝公司的TB6560芯片,该芯片是低功耗、高集成两相混合式驱动芯片,驱动步进电机,用以控制自由摆平板和激光笔的位置。调试模块用于控制模块程序下载与系统调试,正常工作时不使用。

1.2 自由摆机械结构
自由摆机械主要由固定支架、转轴、摆杆、电机、平板、激光笔构成,如图2(a)所示。自由摆转轴上连接有精密电位器作为摆杆角度传感器,电机固定在摆杆底部,平板固定在电机的转轴上。自由摆摆动示意图如图2(b)所示,在平板上放置8枚一元硬币,在摆杆摆动过程中,电机和平板也会随摆杆转动,通过单片机控制电机的转动,使硬币稳定在平板上。同时,在平板下方与平板平行的方向固定有激光笔,通过系统控制,可以实现在摆杆摆动过程中激光笔跟踪预设目标的功能。

2.1 自由摆精确控制理论
在平板中心稳定放置8枚1元硬币(人民币),抬起摆杆让摆杆与支架成一定角度θ(45°≤θ≤60°),放开摆杆让其自由摆动。自由摆精确控制必须达到以下目标:在摆杆摆动过程中,要求控制平板状态,使硬币在5个摆动周期中不会从平板上滑落,并尽量减少滑离平板的中心位置。
要达到以上目的,电机必须根据相关参数控制平板的角度,保证摆杆摆动过程中硬币的受力平衡。分析自由摆摆动过程,精确控制主要得保证从摆杆初始位置到平板与摆杆垂直(该状态无须主动控制硬币即可受力平衡)的过程中,硬币保持相对稳定。
2.2 激光追踪理论
激光追踪示意图如图3所示。在距离自由摆1.50 m距离处垂直放置靶子,当摆杆垂直静止且平板处于水平时,调节靶子高度,使激光笔光斑照射在靶子的中心。用手推动摆杆,支架与摆杆角度为θ(θ为30°~60°)。放开摆杆,系统应控制平板在15 s内尽量使激光笔照射在中心线上(偏差绝对值1 cm),这就是激光追踪理论的目标。图3中,b为自由摆摆杆静止时平板中心(激光笔固定点)到靶子中心的线段;a为θ的角平分线与线段b的交点到激光笔固定点的线段;c是激光笔固定点到靶子中心的线段;γ为线段a、c的夹角。
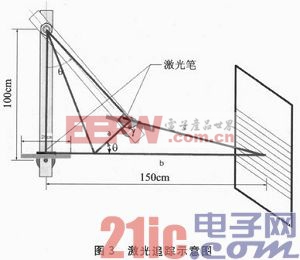
图3中,摆杆与支架的角度θ可以通过转轴上的精密电位器测量,转换成的模拟电压值输出给单片机,单片机通过内置的A/D转换器将模拟电压值转化成数字量,计算出相应的角度θ。为了使系统实现激光追踪功能,必须使激光笔发射的激光始终打在靶心位置。由于激光笔固定在平板下方,并且与平板方向平行,在摆杆摆动过程中我们通过控制γ来实现追踪功能。结合几何运算,对θ与γ之间的关系进行分析:
a=tanθ/2
b=1.5-a
c2=a2+b2-2ab cosθ
sinθ/c=sinγ/b
角度γ即平板的倾角,由于平板固定在步进电机转轴上,因而角度γ也是步进电机转动的角度。通过以上分析,可以知道,实现系统激光追踪的功能必须满足θ与γ之间存在sin θ/c=sin γ/b这一关系。在整个系统运行过程中,单片机不断接收精密电位器采集的θ值,然后进行
分析运算,计算出步进电机的转动角度γ。由于MSP430F5438不含浮点数运算单元,处理数据能力较弱,且会占用CPU大量的工作时间,所以在程序的编写过程中,采用查表法来优化程序。以θ为已知量,γ为未知数运用MATLAB求解,得到θ与γ的关系,如表1所列。在程序运行过程中,当单片机每读到一个θ值,通过查表即可知道与之对应的γ值。
- 二维烟箱缺条检测技术研究(01-14)
- 电容式二维烟箱缺条检测设计(02-05)
- 5G WiFi时代,802.11ac设备面临的大批量测试挑战(09-05)
- 理解罗姆传感器战略(09-27)
- MIMO及其对无线局域网产品生产测试的影响(09-04)
- Altair仿真技术可助电子产品更具竞争力(12-16)