利用FPGA和分解器数字转换器简化角度测量
。在具有恒定旋转速度输入的2型伺服回路中,输出数字字连续跟随或跟踪该输入,而无需外部导出转换。
3 RDC典型实例:SD-14621
SD-14621是数据设备公司(DDC)生产的小型低成本RDC。它有两条具备可编程分辨率控制功能的信道。分辨率编程功能允许选择10、12、14或16位模式。此功能允许低分辨率高速跟踪或者更高分辨率支持更高精度。由于其大小、成本、精度与多功能性,此转换器适用于高性能军用、商用及位置控制系统。
器件的运行需要一个+5V电压。转换器有两个对模拟地为±4V电压范围的速度输出(VEL A、VEL B),可用于替代转速计。为两条信道(/BIT A与/BIT B)提供两个内置测试输出,以指示信号丢失(LOS)。
此转换器由三大部分组成:输入前端、误差处理器和数字接口。前端对于同步器、分解器和直接输入端有所不同。电子Scott-T用于同步器输入,分解器调节器用于分解器输入,而正弦与余弦电压跟随器用于直接输入端。这些放大器可以馈送高精度控制变压器(CT)。CT的另一个输入是16位数字角度ψ,其输出是两个输入之间的模拟误差角度或差分角度。CT采用放大器、交换机、逻辑电路与电容器以查准率执行SINθ COSψ - COSθ SINψ = Sin(θ-ψ)的三角函数计算。
与常规精密电阻器相比,这些电容器按查准率使用,以获得更高精度。另外,这些电容器(与运算放大器一起用作计算元件)进行高速采样,以消除偏移和运算放大器偏差。
DC误差处理进行积分运算,然后得到驱动电压控制振荡器的速度电压。此VCO与速度积分器结合在一起构成递增积分器:一种2型伺服反馈回路。
4 基准振荡器
我们设计中采用的OSC-15802功耗振荡器也是DDC公司提供。此器件适用于RDC、同步器、LVDT和感应式传感器应用。频率与振幅输出可以分别由电容器和电阻器编程。输出频率范围介于400Hz~10kHz之间,输出电压为7Vrms。图4显示了器件的方框图。

馈送到分解器和RDC的振荡器输出用作基准信号。FPGA的I/O电压为3.3V,而RDC的电压为5V。我们采用电压收发器实现两个器件之间的电压兼容。
5 VIRTEX-5 FX30T FPGA与RDC接口
在本设计中采用赛灵思Virtex®-5 FX30T FPGA 。FPGA的I/O电压为3.3V,而RDC的电压为5V。因此我们采用电压收发器来实现这两个器件之间的电压兼容。通过赛灵思提供的GPIO IP核与FPGA建立内部连接,如图5所示。为了简单起见,图5仅显示一条具有一个分解器接口的信道。

6 器件驱动程序详细说明
在本例中,FPGA采用20MHz的外部输入时钟。此FPGA具有一个运行频率为200MHz的PowerPC 440硬核。RDC的时序图见图6与图7。
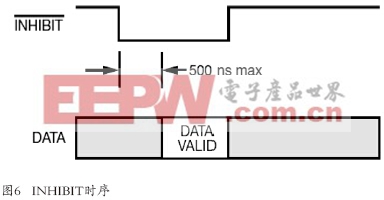
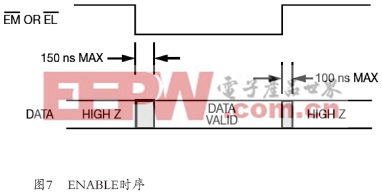
根据RDC的时序图,我们开发、测试并验证了实际硬件的功能是否正确。器件驱动程序的实际编码包含在单独的XBD文件中。根据时序图,我们生成了用于回路的所需延迟。在200MHz运行速率下进行处理时,每个计数都对应5纳秒的延迟。
器件驱动程序有三部分编码:RDC初始化、控制信号的生成及从RDC信道A的读取、以及控制信号的生成及从RDC信道B的读取。RDC初始化是设置信号方向和缺省值的阶段。例如,利用以下语句,信号方向将设置为从FPGA“输出”到RDC。
XGpio_WriteReg(XPAR_RESOLUTION_CNTRL_CH_A_
BASEADDR,XGPIO_TRI_OFFSET,0x000);
下一个语句通过写入“0x3”来设置16位分辨率(即:拉高):
XGpio_WriteReg(XPAR_RESOLUTION_CNTRL_CH_A_
BASEADDR,XGPIO_DATA_OFFSET,0x03);
图8为编码截屏。注:为了简化,我们仅提供一条信道的编码。

我们已经看到,角度传感器可以帮助工程师创造更好的转轮,进而设计出众多更高效的机械装置。分解器是一种尤为有用的角度传感器,只要能够与FPGA正确配合和控制,其就能够帮助工程师打造出无与伦比的机械装置。
- 机械测量中旋转编码器与单片机的通用接口(02-13)
- 旋转变压器在转子位置测量中的应用(07-03)
- 基于LabVIEW的气体微流量测量虚拟仪器的开发(07-23)
- 基于通信技术在三坐标测量系统中的应用(08-16)
- LabVIEW计数滤波器在信号降噪中的应用(08-18)
- 信号完整性与电源完整性的仿真分析与设计(08-31)