基于TMS320F28335的气球吊篮姿态监测装置设计
件。HMC5883初始化包括设置HMC5883工作模式、更新速率设置和传感器FIFO初始化。

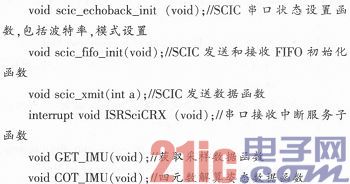
图5为信号处理流程图,模拟信号通过AD采样获得量化数据,对量化数据进行初级平滑滤波后获得采样数据,采样数据通过速率115200串口发送给TMS320F28335,传输过程有0.02%的误差率,当TMS320F28335串口14级缓冲FIFO数据完全载入后会向内核产生SICBRXINT中断信号,内核响应中断并调用中断服务子程序,将FIFO缓冲寄存器中的数据导入到缓存数组中,然后调用四元数解算子函数对采样数据进行解算获取姿态传感的航偏角、俯仰、横滚等姿态数据。最后将姿态数据通过串口发送给PC进行实时更新和显示。
图6为DSCs程序设计流程图。程序采主体采用中断结构设计,将时间轴分成若干片段,使DSCs时分多用,DSCs程序中主要包含:
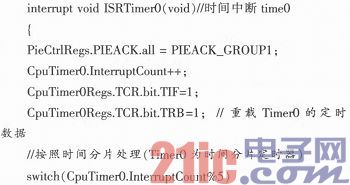
在Time0中断服务子程序中,用CpuTimer0.InterruptCount作为时间片选标志位,通过对其去余操作,使DSCs在不同时间处理不同任务,这在时间逻辑性便于理解和掌握,使用switch—case语句调用过程函数;CpuTimer0.InterruptCount%5=1时,开启串口接收中断开启,数据采用14级FIFO设置,当接收BUFF达到14级后,SCI模块将产生FIFO中断信号通过PIE模块传送给CPU,CPU保存寄存器值以及当前程序指针入栈,响应中断服务子程序更新采样数据缓存数组;同样CpuTimer0.InterruptCount%5=2时,调用COT_IMU()(姿态解算子程序)获取测量航偏角、横滚角,俯仰角姿态数据:CpuTimer0.InterruptCount%5=4时,DSCs将会调用UPto_PC_SCIC()函数,把姿态数据编码后发送给上位机,由上位机软件对数据进行解码和动态显示。

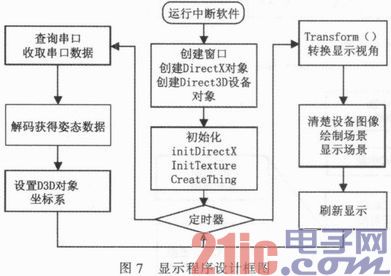
图7为PC上位机程序设计流程图,程序采用以VB+Direct3D显示技术,程序设计中为了让下位机和上位机通信良好,上位机串口采用定时查询方式。当时间达到条件后,系统将对接收数据进行解码了校验,将新的姿态数据赋予D3D对象,等待刷新时重绘图像。


上代码主要描述显示刷新部分,通过调用timer控件更新视角速度可以方便变得调整显示效果,设置其刷新时间通过改变Timer.Interval属性中的值,缩短刷新时间会使得显示效果更佳流畅,通过上位机程序将采样的姿态数据记录下来以便分析。
4 结果
经过测试和试验,本文中所述姿态测量系统工作稳定,并且能够获取实时姿态信息,其姿态解算速率控制在400 Hz/s,显示刷新速率控制在>60帧,串口速率设置在115 200 bps,传输误码率在0.02%,下位机上传数据帧数在20帧/s,姿态监控范围:俯仰角-90°至90°,航偏角-180至180°,横滚角-180°至180°,姿态测量准确有效。

图9中对姿态测量系统做了短时间测试获得的监测数据。其中纵向坐标为角度信息,横向坐标为时间信息,(上)(中)(下)三幅子图为单姿态测试,图中可以看出,在14s左右的测量过程中,姿态传感器的响应速度非常灵敏,通过对(下)图中180°到-180°跳变分析,系统响应速度在0.05s左右。由此系统在运行过程中姿态数据更新速度达到20fps,完全能够满足吊篮缓慢运动下对完成姿态测量的要求。
5 结束语
科学气球吊篮在空中的姿态直接影响探测仪器工作,获取科学气球吊篮的姿态信息有助于对吊篮姿态的控制,也是作为姿态控制反馈中的重要环节,姿态测量系统的精度直接影响到姿态控制性能和精度。本文描述的姿态检测系统硬件设计和软件设计,利用TMS320F28335的优越性能,选用MPU6050和HMC5883测量元件实现系统硬件和软件设计,采用D3D技术实现姿态实时监控并且达到预期效果。
科学气球吊篮 姿态测量 MEMS TMS320F28335 相关文章:
- 基于MEMS和MR传感器的嵌入式系统姿态测量(01-10)
- 旋转状态下动态倾角测量系统设计(10-28)
- 意法半导体在数字输出三轴加速传感器中嵌入智能功能(10-23)
- 工业应用中的测量(02-23)
- 基于ADISl6355 MEMS的惯性测量组件系统设计(03-07)
- 基于傅里叶变换的MEMS地震检波器设计(11-22)