基于超声波测距的导盲系统设计
后从集电极输出,经C7耦合到BG3基极,被BG3放大后从集电极输出,被C8、D5、D6组成的倍压检波电路变为直流电压。双倍于交流信号电压的直流信号电压加到BG3的基极,BG3再放大后由P送往后继电路。
当R40没有收到超声波时,R40没有交流输出,BG2处于静态,BG3也处于静态。C8、D5、D6组成的倍压检波电路没有直流电压输出,BG4处于无偏置状态,处于截止状态,无信号输出。
BG4是以开关方式工作的,当R40检测到超声波时,BG4饱和,C—E之间等于短路,当R40没有检测到超声波时,BG4截止,C—E之间等于开路。
2.4 温度测量电路
常温下,超声波的传播速度为340m/s,但传播速度易受到空气的温度、湿度、压强等因素的影响,其中温度的影响最大,一般温度每升高1℃,声速增加约为0.61m/s。
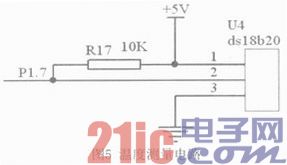
本文采用DS18B20检测现场温度,用以实现实际波速的校准。DS18B20是DallaS公司开发的12Wire(单总线)高精度数字式半导体温度传感器。其抗干扰能力强、转换精度高,使用时无需标定或调试,与微处理器的接口电路简单,可方便地实现多点组网测温,给硬件设计带来了极大的方便。
DS18B20单总线通信功能是分时完成的,因此读写时序很重要。系统对DS18B20的各种操作必须按协议进行。
操作协议为:初始化DS18B20(发复位脉_)→发ROM功能命令→发存储器操作命令→处理数据。系统采用STC89S52作为控制核心,P1.7接数据总线,控制DS18B20进行温度转换和传输数据,同时数据总线上还要接4.7k左右的上拉电阻。
对DS18B20采用外部供电,从VDD引脚接入一个外部电源,优点在于I/O线不需要上拉,而且总线控制器无需在温度转换期间一直保持高电平。这样在转换期间可以允许在单线总线上传输其他数据,硬件电路如图5所示。
2.5 语音电路设计
本系统语音模块采用了SYN6658语音模块。SYN6658通过UART接口或SPI接口通讯方式,接收待合成的文本数据,实现文本到语音的转换它具有小尺寸贴片封装、硬件接口简单、低功耗、音色清亮圆润等优点。除此之外,SYN6658在识别文本/数字/字符串中更智能、更准确,语音合成自然度上升了一个大的台阶。本系统利用该芯片进行语音播报从而实现导航的效果。
主控制器STC12C5A60S2和SYN6658语音合成芯片之间通过UART接口或SPI接口连接,控制器可通过通讯接口向SYN6658语音合成芯片发送控制命令和导航提示语句文本,SYN6658语音合成芯片把接收到的导航语句文本合成为语音信号输出,输出的信号经功率放大器放大后由喇叭播放。
3 软件设计
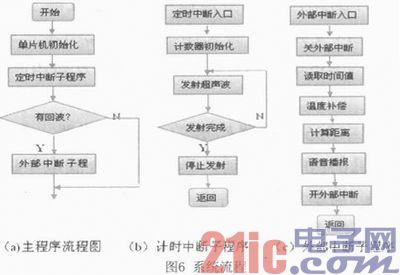
本系统的软件主要完成超声波的发射、接收、单片机的计时及温度补偿后的距离计算、语音播报等功能。它包括主程序、计时中断子程序、语音播报子程序等。其流程如图6所示。
4 结束语
本系统经过多次试验,测试所得结果与设计要求基本一致。系统成功且精确地测出距离并进行了温度补偿计算,本超声波测距的导盲设计有效距离可达到3.8m,测量精度为2.0cm,同时可以实时地通过语音模块播报提示,具有很好的导航功能,能够满足盲人导航器的设计要求,为盲人安全、快速行走提供了保障。
超声波测距 渡越时间法 SYN6658 温度补偿 相关文章:
- 超声波测距器的设计(10-30)
- 结合温度补偿的超声波测距系统设计(01-07)
- 详解超声波测距系统电路的设计(02-06)
- 基于SYN6288的超声波语音测距拐杖的设计(10-18)
- 基于C8051F020的高精度超声波测距系统设计(04-22)
- 超声波测距仪的工作原理(03-01)