基于多传感器探测精度的正确融合航迹判断
后,再计算各雷达传感器距离精度。当选定阈值计算方法和放大系数后,计算融合航迹判断距离阈值。
经度和纬度数据一阶插值公式为

1.2.2 融合航迹真值航迹之间距离误差
获取计算的融合航迹判断距离阈值R0,人工输入融合航迹与真值航迹之间的时间相关阈值T0,作为判断融合系统输出航迹与真值数据之间的相关依据。
根据雷达航迹与真值航迹距离误差计算方法,计算出融合目标Tfi(t)和真值目标Trj(t)的平均距离误差R,并将R与R0进行比较,确定两者之间的对应关系为Rr(Tfi,Trj)。
1.2.3 计算融合航迹对应的真值航迹
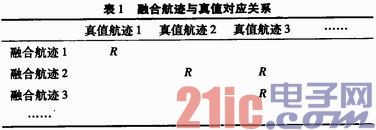
获取存在真值航迹源的各融合航迹起始时间和终止时间,并其按时间先后排序划分为不同的时间段,同时在各个时间段可建立如表1所示关系,若融合航迹与真值距离误差R≤R0,则在对应的行列上标注R。
当关系建立完毕后,统计一个时间段内各融合航迹对应的真值源的数量N。对于N进行如下处理:
若N=0,则融合航迹为虚假航迹;
若N=1,则初步判定融合航迹与真值航迹存在映射关系;
若N>1,则取融合航迹与真值航迹之间的距离误差最小的源,初步判定该真值源为融合航迹与该真值航迹之间存在映射关系。
当处理完毕后,将映射关系保存至数据库。
1.2.4 计算真值航迹对应的正确融合航迹
根据初步判定的融合航迹对应的真值航迹映射关系,统计各时间段内,各真值航迹对应的融合航迹数量M,对于M进行如下处理:
若M=0,则判定真值航迹无对应的融合航迹;
若M=1,则判定融合航迹是真值航迹的正确航迹;
若M>1,则取真值航迹与融合航迹之间距离误差最小的融合航迹为真值航迹对应的正确融合航迹。对于其余的M-1条融合航迹,则根据融合航迹对应真值源的个数N进行处理:
若N=1,则该融合航迹为该真值航迹的重复航迹;
若N>1,修改该融合航迹与真值航迹的映射关系,取融合航迹与真值航迹之间距离误差次小的真值源,初步判定为该融合航迹与该真值航迹之间存在映射关系;修改完毕后,迭代计算真值航迹对应的融合航迹。
亦即对表1中每行统计所有R的最小值,并在最小值所在的单元格标上*;针对每一列统计*的个数;
若一列中有一个以上的*,取*中最小的R标记△,其余*对应的行中,将*改标在R次小的单元格;依次类推,直至所有的*位置均无法变动。对表中的信息进行统计:
(1)若某行为空(不存在R),则该行所对应的融合航迹为虚假航迹。
(2)若某列为空(不存在R),则该真值不存在对应的融合航迹,将进一步判断该目标有对应的雷达传感器输出,即认为该真值目标发生漏情;若该目标无对应的雷达输出,则该真值目标未被探测到。
(3)若一列中有一个以上的*,标记△的融合航迹为真值对应的正确航迹,其余*对应的融合航迹为真值目标的重复航迹。
2 算法验证
该方法经外场试验验证,能够满足工程要求。以其中一个场景进行说明。
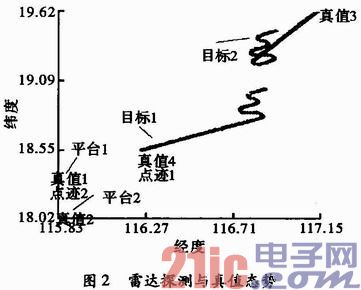
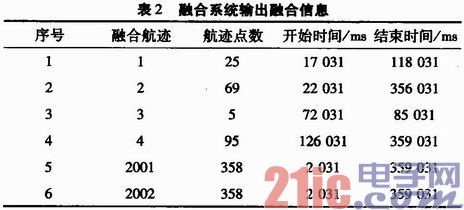
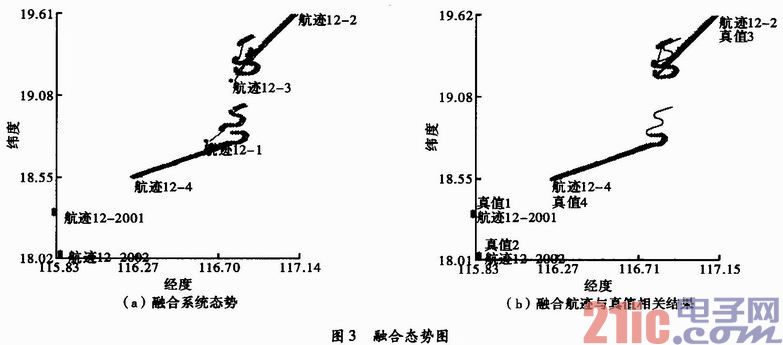
场景设置:在两艘舰艇平台上各部署一部舰载雷达作为传感器,并设置两个空中目标作机动运动。平台导航信息和雷达探测信息均作为数据源参与系统数据融合,试验结束后,将记录的数据保存至数据库。在场景中,雷达探测与真值态势如图2所示,融合系统输出融合航迹信息如表2所示,融合态势如图3所示。
参数设置:进行融合航迹判断时,阈值计算方法采用最大值法,阈值放大系数为2。
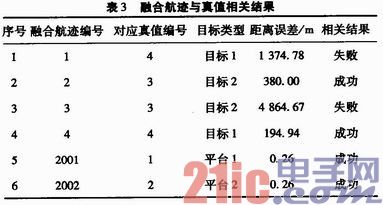
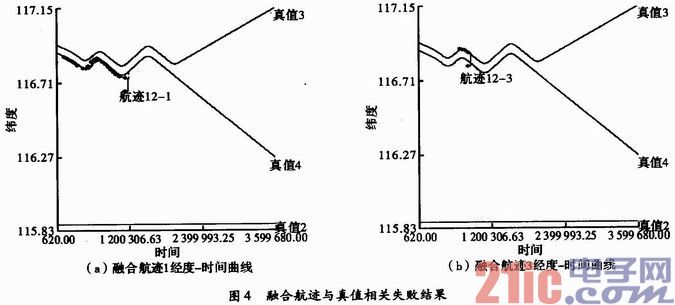
计算结果:经计算,雷达1和雷达2的距离精度分别为118.97 m和245.21 m,则阈值为735.64 m。融合航迹与真值航迹相关结果如表3所示,融合航迹1和3与真值之间距离误差大于阈值,如图4所示,相关不成功,其余融合航迹与对应真值相关成果。
3 结束语
融合航迹与真值航迹的关联是进行多传感器数据融合性能评估的基础,融合航迹正确性的判断直接影响性能评估的准确性,本文对此提出了新的处理算法。但由于多平台数据融合的复杂性和不确定性,如融合航迹的交叉、混批及传感器自身的误差、杂波的干扰等,算法的普适性、准确性有待进一步提升。
- 基于Android的多传感器信息融合技术应用(02-14)
- 多传感器状态融合估计在雷达跟踪中的应用(12-31)
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)