基于多传感器探测精度的正确融合航迹判断
摘要 融合航迹与真值航迹的正确相关性判断是进行多传感器数据融合性能评估的基础,传感器的探测精度对融合系统的性能具有较大影响。文中提出了一种新的融合航迹判断技术,通过计算参与融合的各传感器探测精度,并作为融合航迹与真值航迹之间相关性的距离判断阈值,提高了判断的处理效率和准确度。通过工程应用,证明了算法的可行性。
随着科学技术和武器装备的发展,现代雷达面临的作战环境越来越复杂,相对于单雷达,组网雷达可扩大系统时域、频域、空域的覆盖能力,取长补短,同时发挥各雷达的优越性,实现信息共享,有效提高了发现目标的速度,降低虚警、漏警,全面提高雷达网在恶劣电子战环境下的探测能力,并明显增强了雷达的生存能力。然而,当多部雷达同时工作时,由于各雷达的探测精度、目标高度机动性和各类干扰因素的影响,单雷达测得的数据不能完全反映出目标的真实情况。因此,多雷达数据融合已成为现代雷达组网系统中的关键技术之一。
多雷达数据融合的根本目标是获得比任何单个输入元素更充分、更准确的信息,其融合过程既包含复杂的技术因素,又包含大量的不确定因素、模糊因素,融合系统所汇集和处理的信息种类繁多,信息源之间关系复杂,从而给客观公正评估融合系统带来困难,融合效果评估问题也始终未得到良好地解决。在现有的关于多传感器数据融合评估技术方案中,多是介绍数据融合仿真测试平台、数据融合评估体系以及数据融合系统能力综合评估方法等顶层设计和理论研究,较少涉及到底层具体实现,融合航迹与真值航迹相关技术作为融合效能评估的基础算法更是少被提及。根据目前掌握的融合航迹与真值航迹相关算法存在效率低下,对特殊态势匹配成功率不高等缺点,本文根据融合航迹数据和真值航迹数据特点,提出一种基于传感器探测精度的正确融合航迹判断技术,通过建立全新数据模型,优化算法结构,以提高数据处理能力及正确性。
1 技术方案
1.1 技术原理
对融合航迹和真值航迹进行相关时,需首先设置时间和空间相关匹配参数作为相关阈值进行时空配准后,才能进行其他相关处理。基于传感器探测精度的正确融合航迹判断技术以参与融合的雷达传感器距离精度作为空间配准阈值,完成融合航迹和真值航迹的相关。其具体原理如下:
(1)计算距离相关阈值。计算所有参与融合的雷达传感器距离精度,选择阈值确定方法,并将精度放大相应倍数后计算相关阈值,得
R0=(1+λ)Re (1)
式中,R0为相关的阈值;λ为放大系数;Re为选择的传感器精度。
(2)融合航迹与真值航迹相关处理。
假定在融合态势中,存在真值St=[Tr1(t),Tr2(t),…,TrN(t)]T,有融合系统输出
,计算融合航迹Tfi(t)各航迹点与对应真值航迹Trj(t)航迹点之间距离差R(i,j,t),则平均距离差

。对于给定的R0,若Rr(i,j)≤R0,则融合目标Tfi(t)和Trj(t)之间存在映射关系。这样可建立起所有融合航迹与真值航迹之间的映射关系,该种关系有如下3种情况:
关系1 对于一个给定的融合目标有唯一的真值目标于其对应。
关系2 对于一个给定的融合目标存在多个真值目标与其对应。
关系3 多个融合目标对应于一个真值目标。
对于关系1,只有唯一的选择,融合航迹与真值航迹一一对应;对于关系2,取Rr(i,j)最小Tfi(t)为融合航迹Tfi(t)对应的真值航迹,其余Tfi(t)判断为漏情。
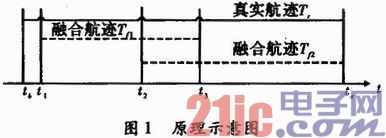
对于关系3,可根据融和航迹的时间段进行划分,如图1所示,在tb至te时间段内,融合航迹Tf1和Tf2与真值航迹Tr存在映射关系,但在各时间段又根据具体关系分为正确航迹段、重复航迹段和漏情段。在tb~t1时间段,真值航迹不存在对应的融合航迹,出现漏情;t1~t2段Tf1为Tr的正确航迹段;在t2~t3到段,Tf1与Tt2均与Tr对应,取距离最近者为正确航迹,且Tf1为Tr的正确航迹,Tf2为重复航迹;而在t3~te段为正确航迹段,则Tf2与Tr对应。
1.2 处理过程
1.2.1 计算雷达航迹与真值航迹距离阈值
根据雷达设备状态和综合态势,人工设定雷达航迹数据与真值航迹数据之间的距离相关阈值R0和时间相关阈值T0。
对于一条给定的雷达航迹Tfi(t)进行相关计算:计算该航迹的每个航迹点与真值航迹Tfi(t)相应点的时间差T,若T≤T0,对真值数据的经度、纬度、高度进行一阶差值,对应到雷达航迹相应时间航迹点,并计算Tfi(t)与Tfi(t)之间的距离误差R;统计所有航迹点平均距离差R,若R≤R0,则记为Tri(t)为Tfi(t)的一个真值源。
在整个工作周期内,两两计算各雷达传感器每个雷达航迹与真值目标间的距离误差均值,计算各雷达航迹对应的真值源。确立两种之间相对应的关系
- 基于Android的多传感器信息融合技术应用(02-14)
- 多传感器状态融合估计在雷达跟踪中的应用(12-31)
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)