铂电阻温度传感器的测量方法及其应用
铂电阻温度传感器作为一种高精度温度传感器广泛用于气象、汽车、航空、工业自动化测量和各种实验仪器仪表等领域。铂电阻温度传感器的测温原理是金属铂(PT)电阻值随在环境温度变化而变化,且其电阻值和温度值之问有确定的函数关系,最常见的类型是Pt100和Pt1000。
1 铂电阻温度传感器的三种引线方式
根据测温传感器引线方式的不同,铂电阻分为二线制、三线制和四线制三种,三种引线方式各有特点,二线制引线方式具有引线简单,但存在的问题是测量误差较大,在测量中不可避免的引入线电阻误差,仅适合于测量精度要求不高的场合。
三线制引线方式采用一端引线为两根线,另一端引线为一根的方式,工业上一般都采用三线制接法,三线引线方式引出的3根导线截面积和长度均相同,通常三线制电阻采用不平衡电桥法进行测量,在测量时可以消除内引线电阻的影响,测量精度高于两线制。
四线制引线方式中有两根线为供电电源线,另外两根为信号线。电源和信号是分开工作的,该方法可以有效的去除线电阻。如果待测电阻的阻值与导线电阻相当甚至远小于导线电阻时就只能采用四线制的测量方法.该方法测量精度较高,但该方法需要传感器产生4根引线,在长距离传输过程中会增加成本以及整个测试系统的重量,不能满足某些特殊行业要求,主要用于高精度的温度检测。
2 两线制铂电阻测量电路
在铂电阻温度传感器测量系统中,通常惠斯特电桥不平衡时的输出电压Vo来计算铂电阻值,本系统中两线制铂电阻的采集电路如图1所示。
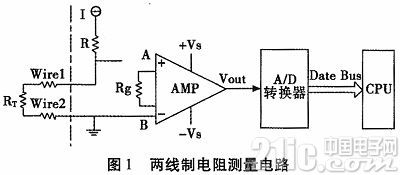
I为恒压源,R为限流电阻,被测电阻为Rt,线电阻为r,测试电路如图1所示。按照欧姆定律计算可知:

上式中,RT:被测铂电阻传感器电阻值;r:传感器引线电阻值;k:运算放大器线性放大系统(通常由增益电阻Rg设定);VOUT:运算放大器输出电压值。
从(2)式中可以看出,用两线制传输,会带来2r的测量误差。测量系统中用的传输线每米电阻约为0.061 Ω,2r为0.122 Ω。假设系统中测量电阻与测量电路的引线有50 m长,则引线电阻产生的误差将达到3.05 Ω,即温度测量误差将达到7.6℃(系统中铂电阻每变化1℃时的电阻变化约为0.398 Ω左右)。
可见,在测量系统与传感器之间距离较远时,则线电阻r对铂电阻采集精度的影响非常大,因此两线制铂电阻仅适合于引线距离比较近,测量精度要求一般的场合。
3 三线制电阻测量电路
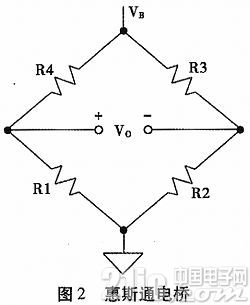
3.1 惠斯通电桥(Wheatstone Bridge)
当
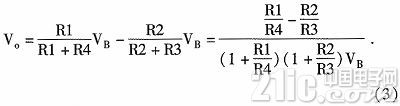
,电阻桥达到平衡,由式(3)可以看出,这时无论激励源是电流型还是电源型,也无论激励源的大小,V0均输出为零。因此,如果R2/R3是一个固定系数K,则当R1=K×R4时,电桥将达到平衡,即有:Vo=0。
这种平衡值测量方法通常用在反馈控制系统中,当桥臂上的电阻即使呈现非常微小的变化也会反映在输出电压的改变,通过监测桥是否平衡可以实时监测传感器监测对象(力、温度等)的变化情况。将电桥的输出电压VO做为执行机构的反馈信号,实时监测执行偏差,不断修正执行指令。常用于力矩测量、电热调节控制器领域。
通常情况下,我们认为激励源VR是一个固定值,由式(1)可以看出,桥输出电压VO的大小与激励电源VR呈线性比例关系,因此该测量系统的精度永远不可能比激励电源的精度高。
3.2 三线制引线非平衡电桥测量电路
由惠斯特电桥理论可知,若电桥工作时,电桥的4个桥臂上有1个发生了变化,即R1变为R’=R1+△r,那么惠斯特电桥的平衡就会被打破,即图2中
,则A、B间存在一定的电势差UL,则称此电桥为非平衡电桥,即有VO=UL≠0。
利用非平衡电桥原理.将各种电阻型传感器RT接入电桥回路,桥路的非平衡电压就能反映出桥臂电阻的微小变化,因此,就可以检测出外界物理量的变化(温度、压力等),R是测量系统选定的精密桥臂电阻,RT为被测电阻。
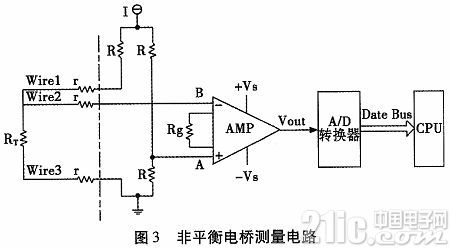
两条输入端接入高输入阻抗的运算放大器,这样由偏置电流在线电阻上引起的压降会降到最小,这样会最大限度的减小漏电流,按照基尔霍夫电流电压定律可知:
由公式(4)可以看出在此测量系统中,当RT>R时,因桥臂的输出电压VOUT为负值,因此为保证VOUT一直输出为正,则该测量系统桥臂电阻值R应当大于被测电阻RT的上限电阻值,以PT1000为例,0℃时其电阻值为1 000 Ω,其电阻有效变化范围为803 Ω~2 120 Ω(即温度变化范围为-50℃~300℃),则桥臂电阻R的应当选取大于其铂电阻值的变化上限(2120 Ω),在本例中,桥臂电阻R选取2 700 Ω,完全满足测量需求且不会发生溢出现象。
在激励电流源为典型值1 mA的条件下,此时VAB的变化范围为153~575mV,AMP为
- 基于铂电阻的宽量程高精度温度测量装置(01-23)
- 基于铂电阻的高精度温度检测电路(02-06)
- 铂电阻的温度测量系统设计(01-09)
- 基于C8051F350及CC1000的高精度无线水温测量系统设计(02-07)
- 一种线型组网的三线制数据测量方法(01-16)
- 频宽、取样速率及奈奎斯特定理(09-14)