基于CNC齿轮测量中心的齿条滚刀测量
时间:02-27
来源:互联网
点击:
对复杂的齿轮刀具进行精密的测量及误差计算,一直是几何计量领域中的一个重要课题。随着坐标测量技术的广泛应用,正确地快速测量和计算误差对提高生产率和产品质量起着十分重要的作用。本文针对齿条滚刀的几何特性、在CNC齿轮测量中心上测量的实现原理、整体运动控制流程、各误差测量项的运动轨迹控制及测量结果进行阐述。
齿条滚刀的基本几何特性
齿条滚刀又称为环形扣滚刀或环形齿条滚刀,是螺旋升角为0的特殊齿轮滚刀。齿条滚刀的头数为被加工齿条的齿数z+1,周节p等于被加工齿条的周节,为π乘以滚刀模数m,在分度圆处齿条滚刀的齿厚和齿间距相等,都为p/2,其齿形与被加工齿条的齿形相同。由于齿条滚刀的连续切削和高加工效率的特点,其在齿条的加工中被广泛使用[1]。
CNC齿轮测量中心测量齿条滚刀的实现原理
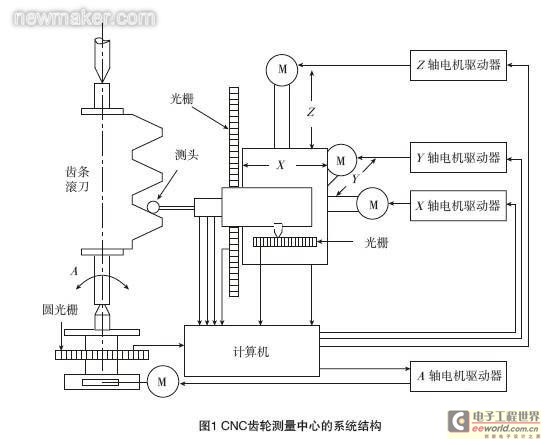
CNC齿轮测量中心采用坐标测量原理,是由计算机控制的极坐标测量机,它的机械运动包括轴向(Z轴)、径向(X 轴)、切向(Y 轴)3个方向的直线运动和一个主轴(A 轴)的旋转运动以及微位移传感器测头的小范围移动[2]。CNC 齿轮测量中心的系统结构如图1所示。
整体运动控制流程
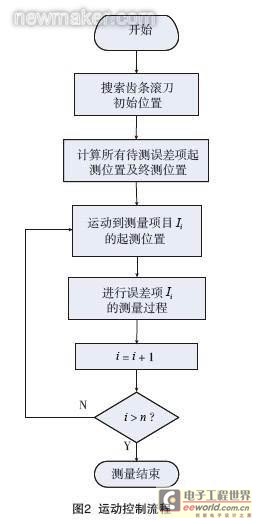
通过齿条滚刀的头数、模数、压力角、容屑槽数、铲背量以及偏位值等基本参数推导出其他用于测量运动的各参数,用户可根据需要选择待测量误差项,计算机根据已选择测量项的几何模型生成连续测量的运动轨迹。其测量运动控制流程如图2所示。
测量的运动轨迹及实例
基于坐标测量原理的CNC齿轮测量中心能快速、准确、自动地测量齿条滚刀的螺旋线误差、齿形误差、刀齿前面径向性、容屑槽周节误差、容屑槽导程误差以及外圆径向跳动误差等各项目,下面以基本参数为mn=2,an=20°,z =27,zk =16,k =9,e =4.5,Dao=150的齿条滚刀为例,介绍各误差项的运动轨迹及实测结果[3-5]。
1 螺旋线误差的测量
齿条滚刀装卡时,规定滚刀前刀面要朝向操作者的右侧,则在上侧的齿面为右齿面,在下侧的齿面为左齿面。由于实际齿条滚刀的侧后刀面需要铲齿以形成侧后角和顶后角,导致滚刀左右齿面的导程与其基本蜗杆螺旋面的导程不同,除两侧刀刃处于基本蜗杆螺旋面上外,其他点并不在基本蜗杆螺旋面上。
根据国家标准GB/T6084—2001关于滚刀螺旋线误差的规定:相邻切削刃的螺旋线误差是相邻切削刃与内孔同心圆柱表面的交点对滚刀理论螺旋线的最大轴向误差。在进行滚刀螺旋线误差测量时,测量得到分度圆螺旋线上的一系列刃口点,计算出被测齿条滚刀的螺旋线误差值,并可根据相邻切削刃螺旋线误差计算出一转内切削刃螺旋线误差和三转内切削刃螺旋线误差。
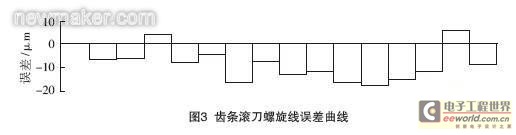
测量齿条滚刀的螺旋线误差时,需要将测头手动调整到待测螺旋线的完整齿上方的齿槽内,则该齿即为滚刀螺旋线的1号齿,也是螺旋线误差计算的基准齿,把X轴的坐标值控制在齿条滚刀的分度圆半径处,Y轴坐标为0,由于齿条滚刀螺旋升角γ为0的特殊性,只需控制主轴旋转即可,测头从起测齿开始共扫描测量Zk个切削刃。图3为齿条滚刀的实测螺旋线误差曲线。
国家标准GB/T6084—2001关于滚刀齿形误差的规定为在检查截面中的测量范围内,容纳实际齿形的两条理论直线齿形间法向距离。在测量齿条滚刀时,不论其容屑槽是直槽的还是螺旋槽的,若存在偏距或径向前角不为零时,其刃口齿形都是曲线,但切削刃口上的各点还是在其基本蜗杆的螺旋面上,因而可逐点测出切削刃口的齿形误差。
齿条滚刀的齿形有“刃口齿形”和“铲背齿形”之分,但两者测量的理论基准都是滚刀的设计齿形。测量刃口齿形时,控制测头的Y轴坐标不变,旋转主轴至测头脱离齿面,则完成对侧铲面的一次扫描,获取该处的刃口坐标,以此可以获得齿条滚刀不同半径的各点刃口坐标,实测误差曲线如图4所示。测量铲背齿形时,滚刀处于静止状态,控制测头的Y轴坐标位于齿条滚刀的偏位值处不变,X和Z轴联动从侧铲面齿根向齿顶进行扫描,实测误差曲线如图5所示。
齿条滚刀的基本几何特性
齿条滚刀又称为环形扣滚刀或环形齿条滚刀,是螺旋升角为0的特殊齿轮滚刀。齿条滚刀的头数为被加工齿条的齿数z+1,周节p等于被加工齿条的周节,为π乘以滚刀模数m,在分度圆处齿条滚刀的齿厚和齿间距相等,都为p/2,其齿形与被加工齿条的齿形相同。由于齿条滚刀的连续切削和高加工效率的特点,其在齿条的加工中被广泛使用[1]。
CNC齿轮测量中心测量齿条滚刀的实现原理
CNC齿轮测量中心采用坐标测量原理,是由计算机控制的极坐标测量机,它的机械运动包括轴向(Z轴)、径向(X 轴)、切向(Y 轴)3个方向的直线运动和一个主轴(A 轴)的旋转运动以及微位移传感器测头的小范围移动[2]。CNC 齿轮测量中心的系统结构如图1所示。
整体运动控制流程
通过齿条滚刀的头数、模数、压力角、容屑槽数、铲背量以及偏位值等基本参数推导出其他用于测量运动的各参数,用户可根据需要选择待测量误差项,计算机根据已选择测量项的几何模型生成连续测量的运动轨迹。其测量运动控制流程如图2所示。
测量的运动轨迹及实例
基于坐标测量原理的CNC齿轮测量中心能快速、准确、自动地测量齿条滚刀的螺旋线误差、齿形误差、刀齿前面径向性、容屑槽周节误差、容屑槽导程误差以及外圆径向跳动误差等各项目,下面以基本参数为mn=2,an=20°,z =27,zk =16,k =9,e =4.5,Dao=150的齿条滚刀为例,介绍各误差项的运动轨迹及实测结果[3-5]。
1 螺旋线误差的测量
齿条滚刀装卡时,规定滚刀前刀面要朝向操作者的右侧,则在上侧的齿面为右齿面,在下侧的齿面为左齿面。由于实际齿条滚刀的侧后刀面需要铲齿以形成侧后角和顶后角,导致滚刀左右齿面的导程与其基本蜗杆螺旋面的导程不同,除两侧刀刃处于基本蜗杆螺旋面上外,其他点并不在基本蜗杆螺旋面上。
根据国家标准GB/T6084—2001关于滚刀螺旋线误差的规定:相邻切削刃的螺旋线误差是相邻切削刃与内孔同心圆柱表面的交点对滚刀理论螺旋线的最大轴向误差。在进行滚刀螺旋线误差测量时,测量得到分度圆螺旋线上的一系列刃口点,计算出被测齿条滚刀的螺旋线误差值,并可根据相邻切削刃螺旋线误差计算出一转内切削刃螺旋线误差和三转内切削刃螺旋线误差。
测量齿条滚刀的螺旋线误差时,需要将测头手动调整到待测螺旋线的完整齿上方的齿槽内,则该齿即为滚刀螺旋线的1号齿,也是螺旋线误差计算的基准齿,把X轴的坐标值控制在齿条滚刀的分度圆半径处,Y轴坐标为0,由于齿条滚刀螺旋升角γ为0的特殊性,只需控制主轴旋转即可,测头从起测齿开始共扫描测量Zk个切削刃。图3为齿条滚刀的实测螺旋线误差曲线。
国家标准GB/T6084—2001关于滚刀齿形误差的规定为在检查截面中的测量范围内,容纳实际齿形的两条理论直线齿形间法向距离。在测量齿条滚刀时,不论其容屑槽是直槽的还是螺旋槽的,若存在偏距或径向前角不为零时,其刃口齿形都是曲线,但切削刃口上的各点还是在其基本蜗杆的螺旋面上,因而可逐点测出切削刃口的齿形误差。
齿条滚刀的齿形有“刃口齿形”和“铲背齿形”之分,但两者测量的理论基准都是滚刀的设计齿形。测量刃口齿形时,控制测头的Y轴坐标不变,旋转主轴至测头脱离齿面,则完成对侧铲面的一次扫描,获取该处的刃口坐标,以此可以获得齿条滚刀不同半径的各点刃口坐标,实测误差曲线如图4所示。测量铲背齿形时,滚刀处于静止状态,控制测头的Y轴坐标位于齿条滚刀的偏位值处不变,X和Z轴联动从侧铲面齿根向齿顶进行扫描,实测误差曲线如图5所示。
CNC齿轮测量滚刀测 相关文章:
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)
- 泰克全新VM6000视频测试仪助力数字电视等产品测试 (10-06)