MATLAB中的SISOTOOL在数字式移相全桥中的应用
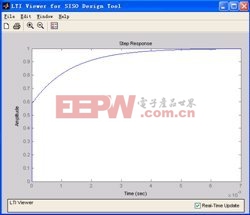
于一定数值,使阶跃响应无静差。然后,再加入积分环节也可相应提高其低频部分的增益。如图4所示。

(a)

(b)
图4
为了使系统具有更快的动态响应,在保证系统稳定的前提下,电流环的截止频率不仅要大于电压环的截止频率,而且应该越大越好,因为该电流必须有足够的带宽使电流跟踪电流给定。一般取电流环的截止频率为开关频率的1/5~1/10。
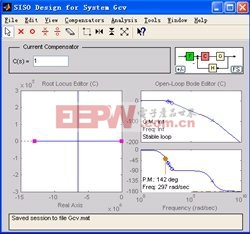
为了保证足够的相位裕度,而且保证较高的截止频率,且以-20db穿越,考虑添加一个零点,再进行适当的调整,可得图5所示的图形。当相位裕度很大,截止频率很高时,系统超调很小或无超调。得到电流环的PI环节为 
PI环节的参数是Ki=7550,Kp=5.67,相角裕度为135°,截止频率为5.33×106rad/sec。

(a)
(b)
图5
3.2 电压环的设计
电压环的补偿网络是把已经设计好的电流内环看做电压调节系统中的一个环节来进行。就是说,设计电压补偿环节的时候必须先把电流环闭合,控制对象是输出误差电压控制信号到变换器输出电压的传递函数。对电压环来说,其功率级的传递函数包含电流环和负载。其系统控制框图如图6所示。
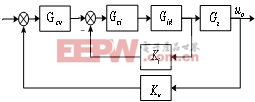
图6 电压控制环
(1)首先要得出电流环的闭环传递函数
在command window输入下列语句:
num=[0.66,347.22];
den=[0.0000000495,0.2679,139.89];
num1=[5.67,7550];
den1=[1,0];
[num2,den2]=series(num,den,num1,den1);
num3=[0.1];
den3=[1];
[num4,den4]=feedback(num2,den2,num3,den3);
printsys(num4,den4);
(2)电流环的负载是由输出电容和负载组成的网络,和上一个环节串联。

在command window输入下列语句:
num5=[5.76];
den5=[0.0019008,1];
[num6,den6]=series(num5,den5,num4,den4);
(3)取Kv=1/48,输入如下的指令:
num7=[1];
den7=[48];
[num8,den8]=series(num6,den6,num7,den7);
G1=tf(num8,den8);
Sisotool;
(4)同理,导入对象模型,命名为Gcv。观察开环系统的阶跃响应,如图7(b)所示。开环系统的阶跃响应有静差,因此,应该增大低频增益使其阶跃响应达到1。相应的加入积分环节也可以提高低频增益。
(a)

(b)
图7
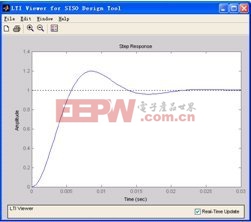
经过调节后电压环的PI配置为

相角裕度为48.5°,截止频率为333rad/sec。系统幅频特性和阶跃响应如图8所示。

(a)
(b)
图8
4、仿真结果
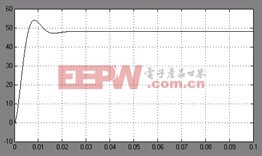
图9 移相全桥输出电压波形

图10 有负载扰动时的波形
图9为移相全桥在正常情况下输出电压的响应波形,电压在很短的时间内达到48V。图10为有负载扰动时的波形,系统在遇到扰动后很快恢复平衡,输出仍然为48V。
5、结论
采用SISOTOOL可以很快的设计出系统的双控制环,既能保证系统的稳定性,也能保证系统好的动态性能,大大缩短了设计系统需要的时间。在模型复杂、二阶以上的数字控制的电源系统中,用SISOTOOL对闭环控制系统进行校正,减少了设计的复杂性,有效地提高了校正系统的控制精度,提高了控制系统的设计的效率和质量。
应用 相全桥 数字式 SISOTOOL MATLAB 相关文章:
- 那些经典的过流保护电路应用举例(12-09)
- 便携应用的电源管理挑战(12-09)
- 技术解析:单片机应用系统的可靠性设计(12-09)
- 多路输出开关电源的设计以及实际应用原则(12-09)
- 变频电源分类及其应用领域详细介绍(12-08)
- 浅析工业领域对UPS电源的应用要求(12-08)