开关电源峰值电流模式次谐波振荡研究
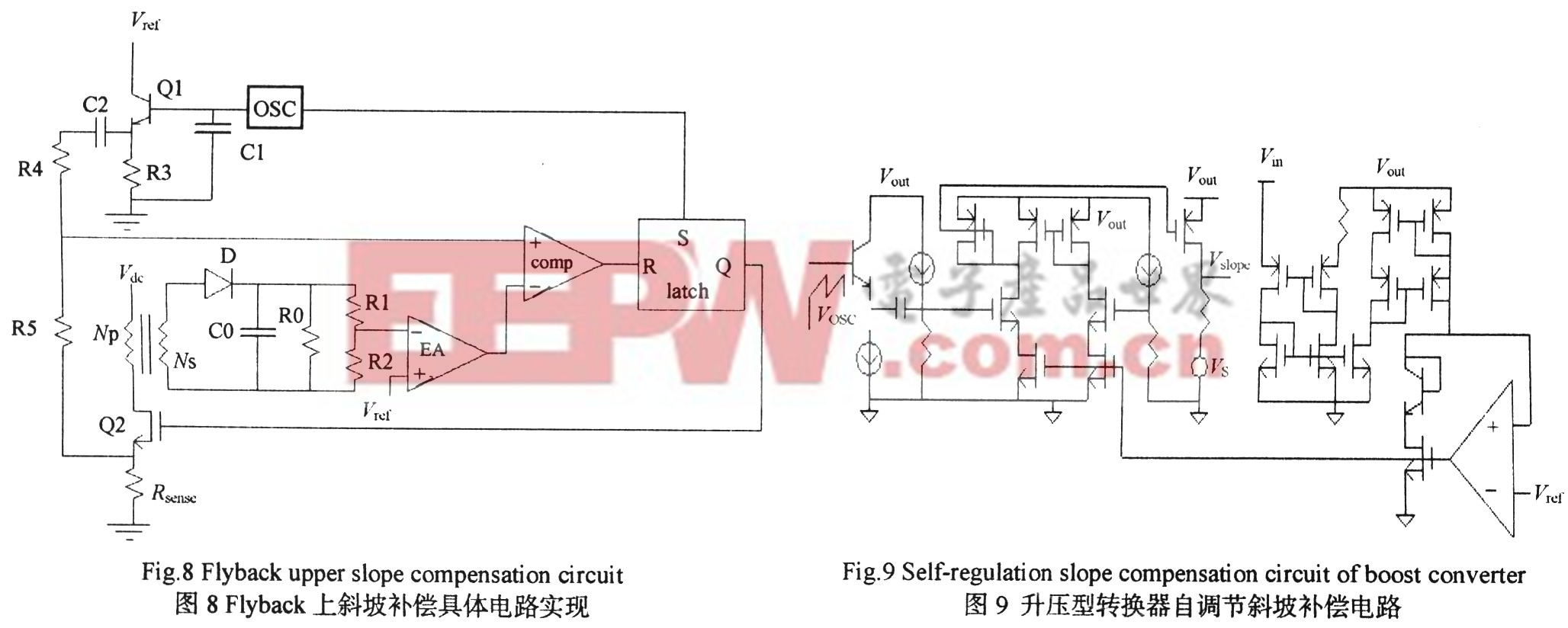
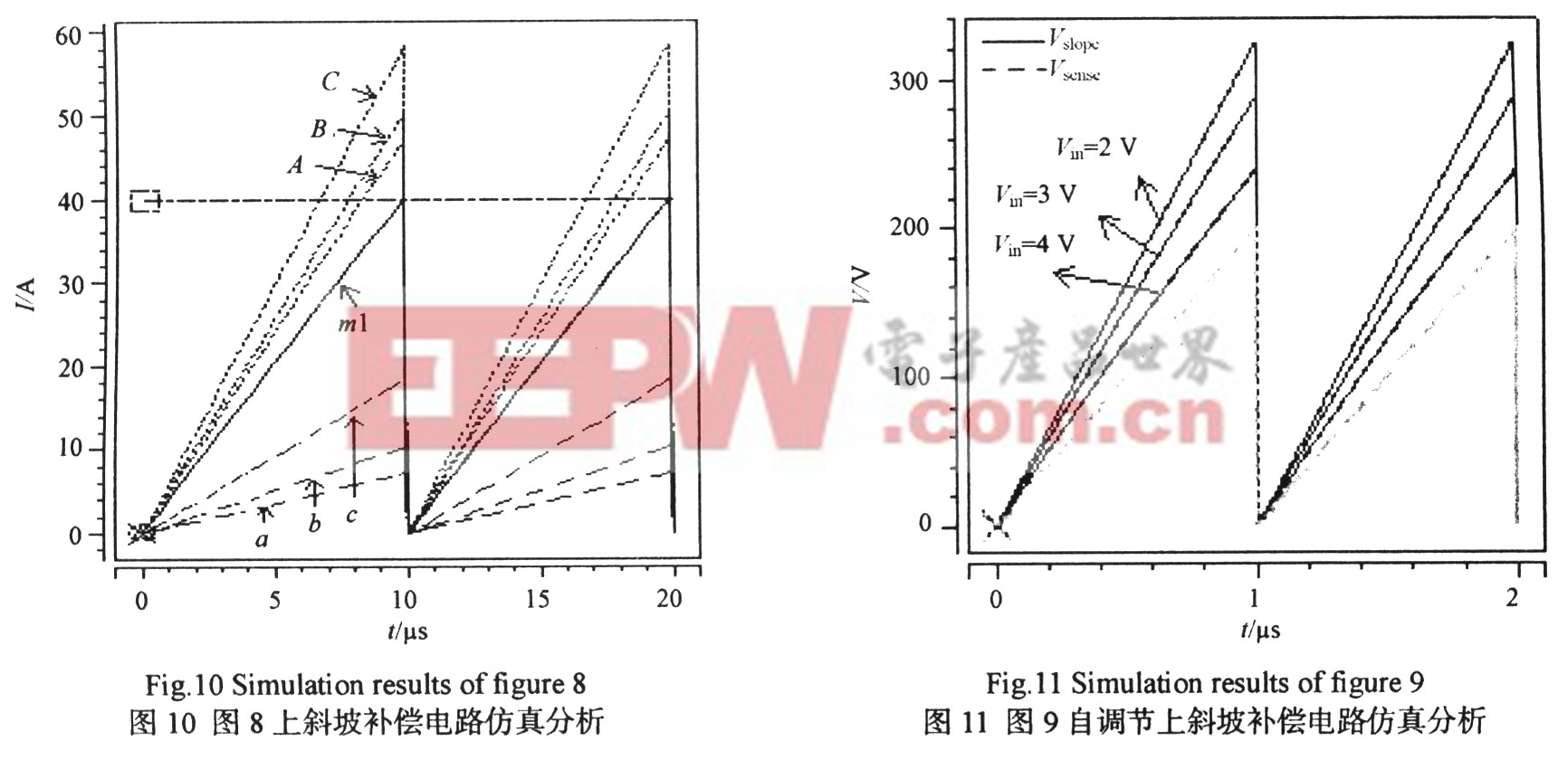
,Qs小于0,此时电流环传递函数将在右平面产生2个极点,导致电流环路不稳定,从而整个开关电源系统都处于不稳定状态,将在1/2开关频率(即ωs/2)处发生振荡,这就是次谐波振荡的真正由来。引入斜坡补偿后,若m>(m2-m1)/2即m>max[(m2-m1)/2]=m2/2时,Qs大于0,此时电流环传递函数的极点将出现在左半平面,此时系统也不一定稳定,只有保证电流环具有足够的相位裕度时,系统才稳定。当m2>m>m2/2时,系统虽稳定,但此时还是会出现振铃电流,只有当m=m2即阻尼系数为π/2时,系统才能在一个周期内消除振铃电流,从而获得非常好的瞬态响应。当m>m2时,虽然电流环相位裕度增加,但其带宽变小,即出现过补偿现象,此时会影响系统的响应速度。 因Buck与Flyback转换器斜坡补偿原理电路实现基本相同,因此本文只给出了一种上斜坡补偿的Flyback斜坡补偿电路(图8所示)。图9为本文第二作者提出的一种升压型转换器自调节斜坡补偿电路。采用Hspice仿真软件分别对图8和图9进行仿真,仿真结果分别如图10和图11所示。图10的振荡器频率为100 kHz。m1为检测电流曲线,其从0慢慢上升到40μA。虚线a,b和c代表具有不同斜率的斜坡补偿信号,线A,B和C分别为叠加后的曲线。从图10可看出:通过改变电阻R5和R4的比值,可以得到具有不同斜坡的补偿信号。图11中,Vsense为电感上的峰值电流流过检测电阻所产生的电压,Vslope为经上斜坡补偿后的检测电流流过检测电阻所产生的电压。从图11可以看出,不同的输入电压对应不同的补偿斜坡,并且斜坡变化与(Vout-Vin)的变化成正比即达到了自调节功能。 3 结论
2 斜坡补偿方式及电路实现
前文从几个方面研究了次谐波振荡产生的原因,并且指出斜坡补偿能防止系统出次谐波振荡,现研究补偿方式及其具体电路实现。开关电源斜坡补偿分为上斜坡补偿与下斜坡补偿2种方式。图6为下斜坡补偿原理,给出了下斜坡补偿时占空比大于50%的电感峰值电流波形(电流微小扰动作为激励信号)。与图2相比,仅Ve从水平直线改为下斜坡。从图6可以看出,引入斜坡补偿后,电流误差信号每经过一个时钟周期,幅度成比例衰减,最后消失。图7为上斜坡补偿原理,给出了占空比大于50%的电感峰值电流波形。其补偿原理就是在电感峰值电流a上叠加上斜坡补偿电流b,形成检测电流c,使占空比小于50%,稳定系统。由于上斜坡补偿电路实现相对简单,一般采用上斜坡补偿。
对于斜坡补偿,斜率越大,振荡衰减越快,但补偿斜率过大,会造成过补偿。过补偿会加剧斜坡补偿对系统开关电流限制指标的影响,从而降低系统的带载能力;另一方面,过补偿会影响系统瞬态响应特性。通常选择斜坡补偿斜率需根据需要折中考虑。对于Buck和Flyback转换器,补偿斜坡一般取峰值电流下降斜率m2即Vout/L,由于输出电压恒定,所以补偿值便于计算并恒定;对于Boost电路,补偿斜坡也一般取峰值电流下降斜率m2,即(Vout-Vin)/L但由于输入电压随电网变化,从而要求补偿值跟随输入电压的变化,此时若为了电路设计简单,强迫斜坡斜率固定,则可能出现过补偿或欠补偿现象,降低电路性能并导致波形畸变。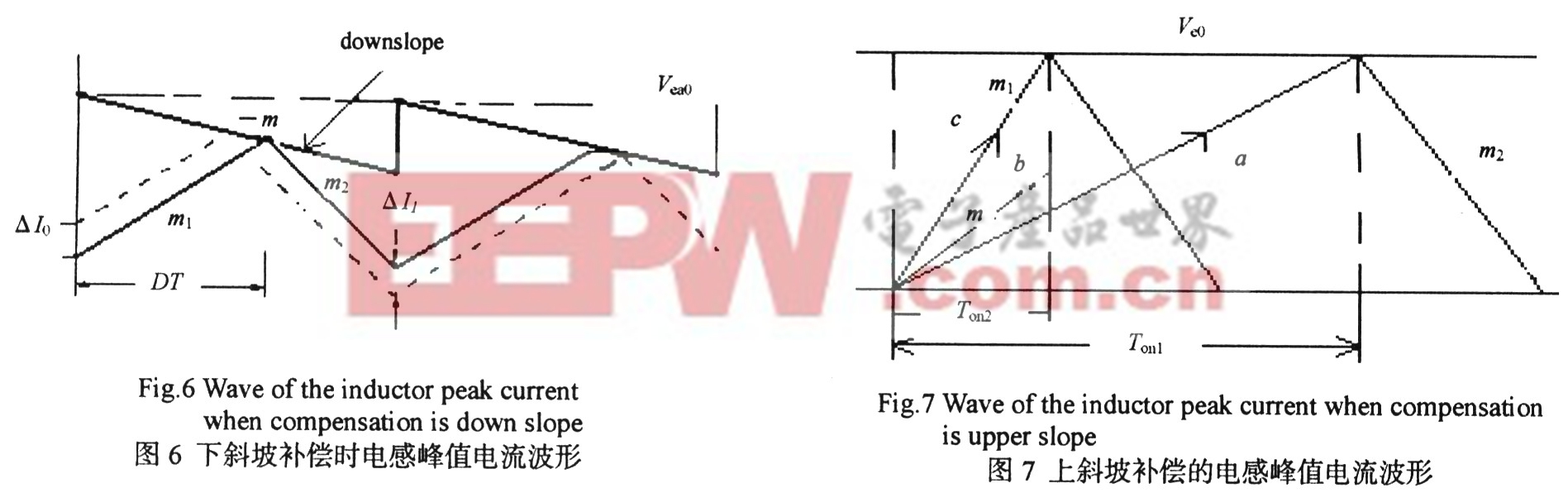
本文对峰值电流模式开关电源的次谐波振荡从定性和定量2个角度分别进行了系统研究,当占空比大于50%时,系统的电流环在1/2开关频率处出现振荡,引入斜坡补偿后能保证电流环路增益的传输函数在1/2开关频率处具有较好的相位裕度,保证系统稳定。最后分析了上斜坡补偿和下斜坡补偿2种避免次谐波振荡的方法,并基于3种最基本的开关电源拓扑(Buck,Flyback和Boost)给出了具体的斜坡补偿电路及仿真结果。
振荡 研究 谐波 模式 峰值 电流 开关电源 DC-DC 相关文章:
- 电源设计小贴士 4:阻尼输入滤波器(第二部分)(02-10)
- 低功耗嵌入式实现的方方面面(04-30)
- 用于低成本高效率离线LED驱动器的初级端调节技术(05-14)
- DC-DC变换器中一种高性能振荡电路的设计(04-08)
- 超宽输入范围工业控制电源的设计(10-15)
- IC及系统级保护功能(08-13)