用于低成本高效率离线LED驱动器的初级端调节技术
时间:05-14
来源:互联网
点击:
随着照明行业的不断创新和迅速发展,加之节能和环保日益重要,高亮度(HB)LED已从简单的指示灯演变为超越传统光源的重要照明源。相比其他照明解决方案,HB LED具有数项显著的优势,例如能耗低、寿命长和照明质量高。不过,HBLED要想成功取代普通白炽灯进入大批量市场,其驱动电子装置的成本必须降至最低。
对传统照明源白炽灯而言,驱动是轻而易举的事情,只要让灯泡直接与电压源连接就行了。大多数能源都是以恒定电压的形式存在的,这使得白炽灯的驱动成本相当低。然而,LED有一个光输出强度,这与它的电流及正向压降成正比,并随温度而变化。因此,LED需要一个恒定电流来驱动,并需要额外的电路。传统上,LED的离线恒定电流驱动器一般是采用带输出电流调节电路 (见图1)的隔离反激式转换器来实现的。通过一个检测电阻测量实际的LED电压,然后与参考电压数值进行比较,得出误差电压。该误差电压经由光耦合器被传送到初级端,用于控制初级端开关器件的占空比。尽管这种方案能够实现出色的LED电流调节,但输出调节电路需要光耦合器、参考电压和检测电阻,大大增加了系统成本,降低了总体效率。
初级端调节(primary sideregulation,PSR)技术可能是将离线LED驱动器的成本降至最低的最佳解决方案。这项技术只需驱动器初级端的信息,就可精确控制次级端的LED电流,不仅消除了输出电流检测损耗,同时省去所有次级反馈电路,从而在不产生庞大成本的前提下提高离线LED驱动器设计的效率。此外,该技术无须次级端反馈电路,即可调节LED驱动器输出电压,这相当于提供了一种开灯过压保护功能,进一步确保了驱动器的可靠性。本文将论述初级端调节技术的基本工作原理,并介绍一种高集成度的初级端调节PWM控制器。与传统的次级端调节方法相比,这种控制器拥有多种显著的优势。
初级端调节的基本概念
图2为初级端调节反激式转换器的基本电路示意图及其典型波形。一般而言,断续传导模式(discontinuousconductionmode,DCM)输出调节性能较好,因此是初级端调节的首选工作模式。初级端调节的关键在于如何在无直接检测的前提下获得输出电压和电流的信息。一旦获得这些数值,通过传统的PI控制方法就可以轻易进行控制了。
在MOSFET导通时间(TON)内,初级端电感(Lm)加载输入电压(VIN)。于是,MOSFET电流(Ids)从0线性增加到峰值(Ipk)。在这段时间内,能量从输入端转移存储在电感中。当MOSFET关断时,存储在电感中的能量促使整流二极管(D)导通。在二极管导通时间(TD)内,输出电压(Vo)加载在次级端电感上(Lm×Ns2/Np2),二极管电流(ID)从峰值(Ipk×Np/Ns)线性下降至0。在TD结束时,所有存储在电感中的能量都释放到输出端。在此期间,输出电压和二极管正向压降之和反映到辅助绕组端,表示为(Vo+VF)×Na/Ns。由于二极管正向压降随电流减小而减小,在二极管导通时间结束时,二极管电流减小为0,故这时辅助绕组电压能最好地反映出输出电压。因此,通过在二极管导通时间结束时对绕组电压进行简单采样,就可以得到输出电压的信息,而二极管导通时间则可通过监控辅助绕组电压而获得。
同时,输出电流的估算需要一些乘法计算。假设输出电流与二极管稳态时的平均电流相等,输出电流可通过下式估算:Io=Ipk×(Np/Ns)×(TD/2Ts)。输出电流估算器通过一个峰值检测电路来获取漏极电流峰值,并利用二极管导通时间(TD)计算出输出电流。
集成式初级端调节控制器
初级端调节PWM控制器,如飞兆半导体公司的FAN102,是一种专门处理初级端调节离线LED驱动器设计的技术。这种技术可显著简化满足更严苛效率要求的设计难题,并省去增加成本和可靠性问题的外部组件,如光耦合器和KA431。图3为FAN102的内部模块示意图。该器件具有一个用于误差放大器的容差为±1%的内部参考电压,可以根据外部组件的容差将输入电流/电压变化减至最小,另外还带有一个集成式外部组件温度变化补偿电路,无论温度如何变化,均可获得高精度。其内部振荡器具有跳频功能以减小EMI,可在输入端使用小型线路滤波器。
结论
结合了采样和输出估算的专有技术可为各种离线LED驱动器提供调节精确、成本更低的实现方案—从街灯到医疗应用,乃至橱柜灯和台灯这类消费电子应用都可实现。现在,这些LED驱动器能够实现更小的尺寸、更低的成本和更高的效率。
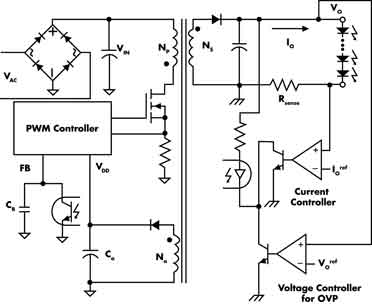
图1 传统的次级端调节离线LED驱动器
对传统照明源白炽灯而言,驱动是轻而易举的事情,只要让灯泡直接与电压源连接就行了。大多数能源都是以恒定电压的形式存在的,这使得白炽灯的驱动成本相当低。然而,LED有一个光输出强度,这与它的电流及正向压降成正比,并随温度而变化。因此,LED需要一个恒定电流来驱动,并需要额外的电路。传统上,LED的离线恒定电流驱动器一般是采用带输出电流调节电路 (见图1)的隔离反激式转换器来实现的。通过一个检测电阻测量实际的LED电压,然后与参考电压数值进行比较,得出误差电压。该误差电压经由光耦合器被传送到初级端,用于控制初级端开关器件的占空比。尽管这种方案能够实现出色的LED电流调节,但输出调节电路需要光耦合器、参考电压和检测电阻,大大增加了系统成本,降低了总体效率。
初级端调节(primary sideregulation,PSR)技术可能是将离线LED驱动器的成本降至最低的最佳解决方案。这项技术只需驱动器初级端的信息,就可精确控制次级端的LED电流,不仅消除了输出电流检测损耗,同时省去所有次级反馈电路,从而在不产生庞大成本的前提下提高离线LED驱动器设计的效率。此外,该技术无须次级端反馈电路,即可调节LED驱动器输出电压,这相当于提供了一种开灯过压保护功能,进一步确保了驱动器的可靠性。本文将论述初级端调节技术的基本工作原理,并介绍一种高集成度的初级端调节PWM控制器。与传统的次级端调节方法相比,这种控制器拥有多种显著的优势。
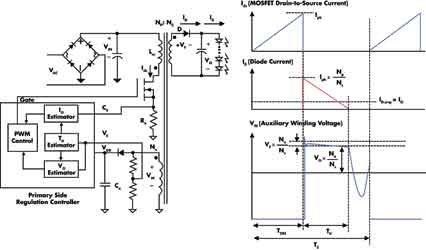
图2 初级端调节离线LED驱动器及其典型波形
初级端调节的基本概念
图2为初级端调节反激式转换器的基本电路示意图及其典型波形。一般而言,断续传导模式(discontinuousconductionmode,DCM)输出调节性能较好,因此是初级端调节的首选工作模式。初级端调节的关键在于如何在无直接检测的前提下获得输出电压和电流的信息。一旦获得这些数值,通过传统的PI控制方法就可以轻易进行控制了。
在MOSFET导通时间(TON)内,初级端电感(Lm)加载输入电压(VIN)。于是,MOSFET电流(Ids)从0线性增加到峰值(Ipk)。在这段时间内,能量从输入端转移存储在电感中。当MOSFET关断时,存储在电感中的能量促使整流二极管(D)导通。在二极管导通时间(TD)内,输出电压(Vo)加载在次级端电感上(Lm×Ns2/Np2),二极管电流(ID)从峰值(Ipk×Np/Ns)线性下降至0。在TD结束时,所有存储在电感中的能量都释放到输出端。在此期间,输出电压和二极管正向压降之和反映到辅助绕组端,表示为(Vo+VF)×Na/Ns。由于二极管正向压降随电流减小而减小,在二极管导通时间结束时,二极管电流减小为0,故这时辅助绕组电压能最好地反映出输出电压。因此,通过在二极管导通时间结束时对绕组电压进行简单采样,就可以得到输出电压的信息,而二极管导通时间则可通过监控辅助绕组电压而获得。
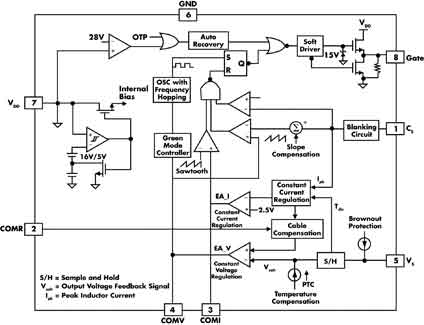
图3 集成式电源开关(FSCQ-系列)的内部模块示意图
同时,输出电流的估算需要一些乘法计算。假设输出电流与二极管稳态时的平均电流相等,输出电流可通过下式估算:Io=Ipk×(Np/Ns)×(TD/2Ts)。输出电流估算器通过一个峰值检测电路来获取漏极电流峰值,并利用二极管导通时间(TD)计算出输出电流。
集成式初级端调节控制器
初级端调节PWM控制器,如飞兆半导体公司的FAN102,是一种专门处理初级端调节离线LED驱动器设计的技术。这种技术可显著简化满足更严苛效率要求的设计难题,并省去增加成本和可靠性问题的外部组件,如光耦合器和KA431。图3为FAN102的内部模块示意图。该器件具有一个用于误差放大器的容差为±1%的内部参考电压,可以根据外部组件的容差将输入电流/电压变化减至最小,另外还带有一个集成式外部组件温度变化补偿电路,无论温度如何变化,均可获得高精度。其内部振荡器具有跳频功能以减小EMI,可在输入端使用小型线路滤波器。
结论
结合了采样和输出估算的专有技术可为各种离线LED驱动器提供调节精确、成本更低的实现方案—从街灯到医疗应用,乃至橱柜灯和台灯这类消费电子应用都可实现。现在,这些LED驱动器能够实现更小的尺寸、更低的成本和更高的效率。
LED 电子 电压 电流 电路 电阻 PWM MOSFET 电感 二极管 飞兆 半导体 放大器 振荡器 滤波器 相关文章:
- 高效地驱动LED(04-23)
- 电源设计小贴士 6:精确测量电源纹波(03-21)
- 构建一个低成本的9V电池电压监控器(07-28)
- 电源设计小贴士 7:高效驱动 LED 离线式照明(04-05)
- 隔离式MOSFET驱动器集成电路的功率效率在轻负载时得到改善(07-31)
- 简单的锂离子电池充电器添加充电状态指示(07-31)