PLC在某型航空电源车O~70 V电路中的应用
摘要:介绍了采用PLC可编程控制器,EM231输入模块等硬件组成的系统控制某型航空电源车0~70 V电路。通过使用PID等运算指令,该系统能控制某型航空电源车工作,使某型航空电源车按要求输出电流、电压。通过试验达到设计要求。
关键词:航空电源车;PLC;PID控制
O 引言
某型航空电源车是保障某型飞机起动而设计的一种多功能综合型电源车。采用了PLC-EM23l组合控制技术、FSLW双流无刷电机,模拟某型飞机发动机启动过程,增加了直流O~70 V起动电源。经过使用,其电源品质和可靠性完全满足某型飞起的启动要求。
1 某型航空电源车O~70 V控制原理
某型电源车0~70 V是从3~4 V左右逐渐增大到70 V左右的直流电源。其控制方式是在双流发电机直流电压励磁调节的基础上,采用PLC可编程控制技术,通过发电机进行采样,由软件控制来实现,其控制原理图见图1。0~70 V输出是通过控制接触器对飞机供电,并和28.5 V输出互锁。通过可编程器输出的PWM信号控制IGBT调整管的导通时间,以此来控制励磁电流的大小,改变发电机的输出电压。同时通过输出采样电压的采样分析判断,对PWM的输出进行补偿和时间调整,以保证O~70 V电压的输出能够满足某型飞机起动特性要求。

工作过程为:由飞机起动系统向地面电源设备发出“升压控制”信号,通过地面电源设备的O~70 V励磁控制电路,按照设计要求自动转换发动机励磁方式,使发电机端电压从其剩余电压逐渐上升到70 V左右。起动升压状态如下:第一阶段,发电机以并励为主,发电机输出从剩磁电压3 V左右迅速上升到14 V左右,电流从零猛增到1900 A左右;第二阶段,发电机由并励转为串励状态,串励后发电机电压从14 V左右上升到38 V左右,起动电流从1900 A左右下降到1200 A左右;第三阶段,飞机发动机起动过程的最后阶段,在这一阶段发电机工作在复励状态,发电机端电压从38 V上升到70 V左右。
2 PLC在直流O~70 V启动电源中的设计
2.1 硬件设计
采用继电器的控制电路中,发电机励磁方式的两次转换是由两个继电器吸合来实现控制的,对继电器吸合电压的准确性要求较高,吸合电压由分压电阻采样发电机输出电压,由电位器来控制,随着分立元件的长时间使用,性能参数等发生改变,都会使继电器吸合电压发生改变;另外采用继电器作为转换控制器件,可导致发电机在升压阶段中电压的每一个转折点处,电压、电流都不是平滑改变的,这将降低用电设备的使用寿命。
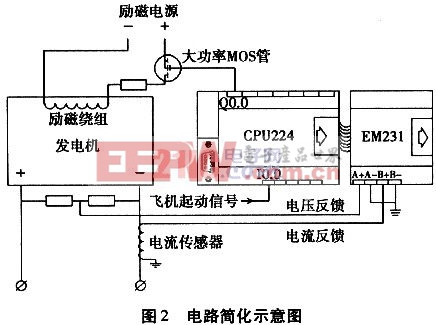
采用PLC可编程控制器控制电路(见图2),可以平稳控制,使发电机输出电压、电流无极变化,延长用电设备使用寿命。西门子S7-200系列可编程控制器,其中中央处理单元采用CPU224,模拟量输入模块采用EM231,硬件电路简化示意见图2。西门子S7-200系列可编程控制器使用CPU224,CPU224集成14输入/10输出共24个数字量I/O点,可连接7个扩展模块,最大扩展至168路数字量I/O点或35路模拟量I/O点,13 k字节程序和数据存储空间,6个独立的30kHz高速计数器,2路独立的20 kHz高速脉冲输出,具有PID控制器,1个RS485通讯口,具有PPI通讯协议、MPI通讯协议和自由方式通讯能力。I/O端子排可很容易地整体拆卸。是具有较强控制能力的控制器。
CPU224的IO.O输入端口检测到飞机起动信号时,通过电阻分压和电流传感器对发电机的输出端电压和输出电流进行采样,采样值进入PLC模拟量输入模块EM231,由中央处理单元CPU224内软件控制,对地面起动电源发电机输出电压和回路电流进行分析判断,比照飞机发动机各阶段所需的电压和电流起动波形,根据判断结果实时在其QO.O端口输出各起动阶段需要的PWM信号来控制大功率MOS管,以此来控制地面起动电源发电机励磁电流的大小,从而改变发电机的输出电压,以保证输出的0~70 V电压严格满足飞机启动特性的要求。
2.2 软件设计
在软件设计中,我们采用了增量式PID控制算法,其具体算法如下:

△P(k)=Kp[E(k)-E(k-1)]+KiE(k)+Kd[E(k)-2E(k-1)+E(k-2)]其中:P(k):为第K次采样时调节器输出,E(k):为第K次采样时的偏差值,Kp、Ki、Kd:PID比例系数。通过采样电压的变化,采用实时控制,闭环调节励磁电流,用PID调节规律,不断修正PID比例系数,按照最佳匹配参数进行输出脉冲宽度控制,使发电机输出电压既满足0~70 V电压逐步升高的起动规律,又保证了各阶段时间节点之间电压的稳定性,使飞机起动电压和转速稳定上升。

2.3 软件控制过程
电压传感器将O~70 V电压转换为0~5 V的直流信号传输给PLC的A+端;电流传感器将0~2500 A电流转换为0~5 V直流信号传输给PLC的B+端;PLC实时采样,计算出△I/t、△V/t的变化值。
(1)采样时间开环,电压、电流双闭环控制方式调整电压输出过程,参照某型飞机的起动过程中时间与电压的对应关系而设置,即:0~3 s前,电压上升至1.5~7 V;3~20 s前,电压上升至7~19 V;20~30 s前,电压上升至19~35 V。
(2)根据电压、电流的变化,非线性分阶段对输出电压进行调整,即根据电流的变化△I和△I/AT电流变化率的制定控制参数的选取,通过软件模糊调节器来控制PWM大小及继电器工作的次序。PLC实时采样,计算出△I/△T、△U/△T的变化值。根据控制要求,确定时间对应变化关系。采用模糊智能控制方式方可得到有效控制的目的。
①模糊关系
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)
- 高效地驱动LED(04-23)
- 电源SOC:或许好用的“疯狂”创意(07-24)