利用混合信号器件获得模拟电压参考值的方法
工程师设计电子产品时面临的主要挑战之一就是在不影响特性集的前提下减小系统尺寸。系统设计每一步骤都要考虑减小尺寸问题,从晶体管大小直到最终产品的尺寸,无不如此。不过,每一阶段的小型化并非总能保持相同的特性集。有时,我们要把较少用到的属性去除掉,从而节约芯片面积。如果特定的应用需要这些特性,那么工程师就不得不使用尺寸更大或者价格更高的芯片,这样才能保留有关特性。不过,工程师通常可采用创新性的设计理念,让低成本芯片发挥超出其基本功能之上的功能,从而实现所需的特性集要求。
许多使用混合信号器件的应用(也称作SoC器件),可将模拟信号转换为数字信号,并在数字域或固件中执行操作。目前,市场上有多种面向需要有限模拟功能应用的SoC产品,比如只需要比较器和模数转换器(ADC)的应用。考虑到最终结果在数字领域完成,因此通常不需要模拟输出引脚。由于模拟输出引脚需要模拟总线和模拟缓冲器来提供外部驱动功能,因此在不使用模拟输出引脚的情况下,可以节约大量芯片面积。
就某些应用而言,即便所有信号处理都在数字领域进行,它们也仍然需要模拟参考电压。例如,我们不妨设想这样一个系统,其ADC范围为0 ~ 5 V,输入信号值为±20 mV。输入信号不能直接用ADC测量,而是要用外部参考电压向输入信号添加DC偏置,将其转化到ADC的范围之内才行。测量结束后,偏置会由固件加以补偿。由于模拟功能有限且不带模拟输出引脚,因此生成输出模拟电压参考是一个很大的挑战。本文将介绍如何在不使用模拟输出引脚的小型化芯片中只用一些外部无源组件来支持模拟电压参考。
基本方法
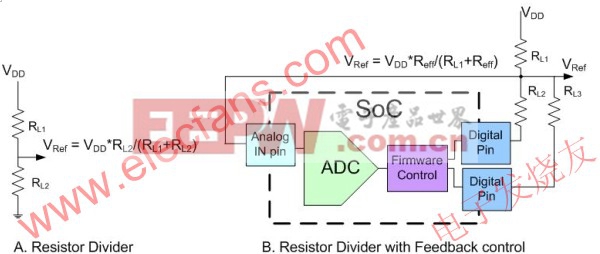
图1:使用电阻分压器电路的参考电压。
每个系统都有可直接作为参考电压或间接获得其他电压参考的供电电压。如图1a所示,电阻分压器法是从供电电压获得电压参考的基本方法。这种基本的电路不带控制回路,其缺点在于参考电压会直接与供电电压的变动相关联。
要想进行稳压或获得不同的电压,我们可如图1b所示向本电路添加控制回路。这样,我们可以测量参考电压并调节电阻,保持所需的参考值。电阻的一端连接到Vref节点,另一端则通过引脚加以控制。引脚可以接地,也可以为高Z。如果引脚接地,那么在有效电阻计算中要加入相应的电阻。如果引脚为高Z,则如同电阻未连接。
参考电压根据并联有效电阻 (Reff) 计算获得,计算方程式如下所示:

如果应用不需要参考电压,则所有引脚都可为高 Z,从而节省功率。我们可通过增加控制电阻的数量来提高控制分辨率,这进而也会增加引脚数量,形成电阻链控制。电阻链控制的概念可用来调节参考电压,同时也能用来在不同时刻获得不同的参考电压。就稳压而言,这种类型的控制只有在变化比控制延迟更慢时才能生效。
传统的PWM-DAC方法
脉冲宽度调制—数模转换器(PWM-DAC)是通过数字引脚获得可编程参考电压的最常见方法。PWM的输出为数字信号,通过低通滤波,可获得如图2所示的平均DC值。低通滤波器截止频率的选择应确保其大大小于PWM的频率输出,以便尽可能接近DC值。
在上述方法中,参考电压由PWM的供电电压(Vdd)和负载周期(D)决定,计算方程式如下所示。如果供电电压为5V,负载周期为50%,那么参考电压就是2.5V。

脉冲宽度变动会改变Vref,不过由于PWM-DAC方法是一种开环系统,只有在供电电压精度很高的时候才有优势。如果供电电压不准确,则输出参考电压也会不准确。获得准确的供电电压成本较高,因此对低成本系统来说是不适用的。为了补偿供电电压的变动,我们可用ADC和固件控制形成如图2B所示的闭环系统。我们用ADC来检测参考电压值,并在固件中调节PWM的负载周期,从而获得所需的参考值。这种反馈回路可减小对供电电压的依赖,但会增大延迟,而且会占用更多系统资源。
自调整电压参考
我们可以假定,尽管模拟组件数量有限,但SoC仍有内部参考电压,自调整电路正由此产生。这在具有ADC的系统通常如此。这种方法是一种通过外部数字引脚获得模拟电压的技术。PWM-DAC方法建立在脉冲宽度调制的基础之上,而这种方法则建立在脉冲密度调制(PDM)原理之上,其中数字信号的密度是信号为高时的百分比。具体而言,信号密度是指由“1”和“0”所构成的数字信号流中“1”所占的百分比。需要注意的是,具体的波形并不重要,只有信号为高的百分比才重要。在提供的参考材料中给出了关于密度信号处理的更多信息。
如图3所示,电路使用SoC中的同步比较器和外部低通滤波器。低通滤波器的输出为反馈,通过模拟输入引脚传递到比较
电压 参考 方法 模拟 获得 混合 信号 器件 利用 相关文章:
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)
- 高效地驱动LED(04-23)