开关磁阻电动机电流变幅斩波分析
θon,θoff分别表示相绕阻开通关断角;
θ1,θ2分别为恒定斩波幅值段起始角度与结束角度,依据不同电机结构取值。
3.2变幅值斩波控制对三相SRM的影响
基于上述电流斩波幅值控制模型,仿真计算分析了与图1传统斩波方式下SRM相同的电机结构参数,相同开通、关断角,相同平均输入电流情况下变幅值斩波控制电流及相应的合成转矩波形,如图3所示。仿真取k=0.007,θon=0.3°,θoff=33.6°,θ1=18.75°且θ2=26.4°。
对比图1与图3可以看出,相绕组通电开始区与通电结束区电磁转矩的提高,使换流期间合成转矩接近于电磁转矩较大的中间区,从而有效地降低了转矩波动。表1为对应图1的传统斩波方式及对应图3的
开关磁阻电动机电流变幅斩波分析
(a)相电流波形(b)相转矩及三相合成转矩
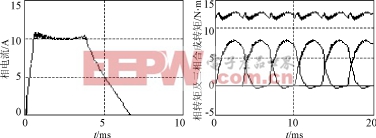
图3变幅值斩波方式下三相SRM
(注:图(b)中为清晰可见三相合成转矩为实际值加5N·m)
(a)相电流波形(b)相转矩及四相合成转矩
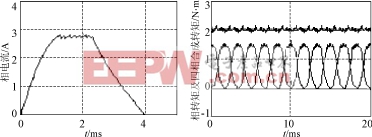
图4变幅值斩波方式下四相SRM
(注:图(b)中为清晰可见四相合成转矩为实际值加0.3N·m)
新型固态氧燃料电池
变幅值斩波方式下输入平均电流,输出平均转矩及转矩波动系数[7]表。由表1可知,变幅值斩波控制在并不降低转矩的情况下,大大降低了转矩波动。
表1三相SRM仿真结果IavTavk
传统斩波变幅值斩波6.43096.46797.29867.31280.27640.1781
3.3变幅值斩波控制对四相SRM的影响
图4为仿真计算的与图2相同条件下变幅值斩波时电流及相应的合成转矩波形图,仿真时k=0.03,θon=0.24°,θoff=25.2°,θ1=7.2°且θ2=20.4°。对比图2、图4,相绕组通电开始区与通电结束区相转矩的降低,使换流期间合成转矩接近于电磁转矩较小的中间区。表2为对应图2的传统斩波方式及对应图4的变幅值斩波方式,输入平均电流,输出平均转矩及转矩波动系数表。由表2可以看出,变幅值斩波控制大大降低了转矩波动,而且电感变化较大的中间段高的相电流使输出转矩有所增加。
表2四相SRM仿真结果IavTavk
传统斩波变幅值斩波1.53221.53221.31281.54320.45190.1447
4结语
开关磁阻电动机固有的转矩波动现象是电机振动和噪声产生的主要原因,所以实现SRM转矩波动最小化具有重要的意义。本文详细的仿真分析表明了针对不同相数采取的不同方式的变幅值斩波控制对降低SRM转矩波动的有效性。
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)