关于中、高压变频器的一些知识
能。 中、高压变频调速和低压变频调速一样,有如下几种控制方式。 41V/f协调控制 交流电动机的感应电势E=4.44Nf迹N为绕组有效匝数)。忽略定子绕组的阻抗,定子电压U≈E=4.44Nf肌5备谋淦德f调速时,如电压U不变,则会影响磁通肌@如,当电机供电频率降低时,若保持电机的端电压不变,那末电机中的冀增大。由于电机设计时的磁通选为接近饱和值,嫉脑龃蠼导致电机铁心饱和。铁心饱和后将造成电机中流过很大的励磁电流,增加铜耗和铁耗。而当供电频率增加,电机将出现欠励磁。因为T=CmI2′cosφ2(Cm为电机结构决定的转矩系数,I2′为转子电流折算值,cosφ2为转子功率因数),磁通的减小将会引起电机输出转矩的下降。因此,在改变电机的频率时,应对电机的电压或电势同时进行控制,即变压变频(VVVF)。 V/f协调控制可近似保持稳态磁通恒定,方法简单,可进行电机的开环速度控制。主要问题是低速性能较差。因为低速时,异步电动机定子电阻压降所 (a)主电路图 (b)四象限传动示意图 () 占比重增加,已不能忽略,不能认为U≈E,这时V/f协调控制已不能保持己愣ā 由于V/f协调控制是依据稳态关系得出,因而动态性能较差。如欲改善V/f协调控制的性能,需对磁通进行闭环控制。 42矢量控制 众所周知,直流电动机具有优良的调速和起动性能,是因为T=CmIa,励磁绕组和电枢绕组各自独立,空间位置互差90°,因而己偷缡嗟缌Ia产生的磁通正交,如忽略电枢反应,它们互不影响;两绕组又分别由不同电源供电,在己愣ㄊ保只要控制电枢电流或电枢电压便可以控制转矩。而异步电动机只有定子绕组与电源相接,定子电流中包含励磁电流分量和转子电流分量,两者混在一起(称为耦合),电磁转矩并不与定子电流成比例。矢量控制的思路就是仿照直流电动机的控制原理,将交流电机的动态数学方程式进行坐标变换,包括三相至二相的变换(3/2)和静止坐标与旋转坐标的变换,从而将定子电流分解成励磁分量和转矩分量(解耦),它们可以根据可测定的电动机定子电压、电流的实际值经计算求得,然后分别和设定值一起构成闭环控制,经过调节器的作用,再经过坐标反变换,变成定子电压的设定值,实现对逆变器的PWM控制。 矢量控制可以获得和直流电动机相媲美的优异控制性能。 43直接转矩控制 直接转矩控制也是分别控制异步电动机的转矩和磁链,只是它选择定子磁链作为被控制的对象,而不像矢量控制系统那样选择了转子磁链,因此可以直接在定子坐标上计算与控制交流电动机的转矩。即通过实时检测磁通幅值和转矩值,分别与给定值比较,由磁通和转矩调节器直接输出,共同形成PWM逆变器的空间电压矢量,实现对磁链和转矩的直接闭环控制。它不需要分开的电压控制和频率控制,也不追求单相电压的正弦,而是把逆变器和电机视为整体,以三相波形总体生成为前提,使磁通、转矩跟踪给定值,磁链逼近圆形旋转磁场。 直接转矩控制不需要坐标变换,也不受转子参数变化的影响,控制器结构简单,而仍具有良好的静、动态性能。 44无速度传感器矢量控制 高性能的调速系统均采用转速闭环。但是速度传感器的安装、维护及低速性能等方面的问题给系统带来麻烦,甚至影响系统的可靠性。因而无速度传感器的控制越来越受到关注和欢迎。问题是从易测得的定子电压、定子电流中如何计算出与速度有关的量。目前常用的方法有:利用电机的基本方程式(稳态或动态)导出速度的方程式进行计算;根据模型参考自适应的理论,选择合适的参考模型和可调整模型,利用自适应算法辩识出速度;利用电机的次谐波电势计算速度,或计算转差频率进行补偿等。 上述四种控制方式中,V/f协调控制是转速开环控制,控制电路简单,是使用较多的一种控制方式,常用于速度精度要求不十分严格或负载变动较小的场合。后三种则用于高性能的通用变频器。通常有三种系统形式,即:有速度传感器的矢量控制、无速度传感器的矢量控制和无速度传感器的直接转矩控制。其中第一种控制精度高且动态性能好,但变频器系统复杂,价格较贵;后二种则控制精度和性能稍逊,但变频器系统较简单,价格较便宜。 除此之外,还有一些简化或改进的控制方式,如:有矢量演算的V/f控制、直接矢量控制(其磁通由测算而不是估算得出)等。 5结语 高压大功率变频器及其相关衍生产品是电力电子行业中尚未最后成功地解决的一个难题,也是近年来全世界范围内该行业竞相关注的热点,它不仅涉及大功率交流电动机的各类负载的调速和节能,而且也与其它一些关系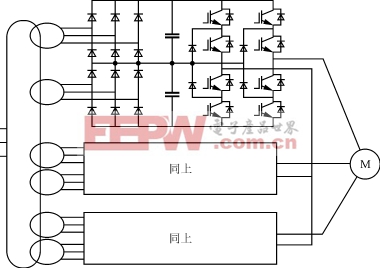
图18三电平变频器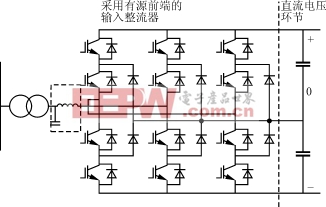
图17三电平PWM整流器
- 基础知识大百科:电感线圈的用途与区分(12-09)
- 电源知识 DC-DC 模块调节(12-08)
- 有关隔离开关的基本知识及注意事项(12-08)
- 汽车知识之发动机不能启动的七种原因(12-08)
- 工程师总结:IGBT知识梳理(01-22)
- 电源知识大汇总 了解电源之原理及结构(12-27)